

A multifunctional six-track underwater robot
An underwater robot and crawler-type technology, applied in the direction of underwater operation equipment, manipulators, ships, etc., can solve the problem that a single underwater robot has limited load and layout space, cannot complete grasping, drilling, cutting at the same time, and cannot carry multiple Work tools and other issues, to achieve the effect of reducing labor intensity and use costs, high work efficiency, and avoiding losses
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
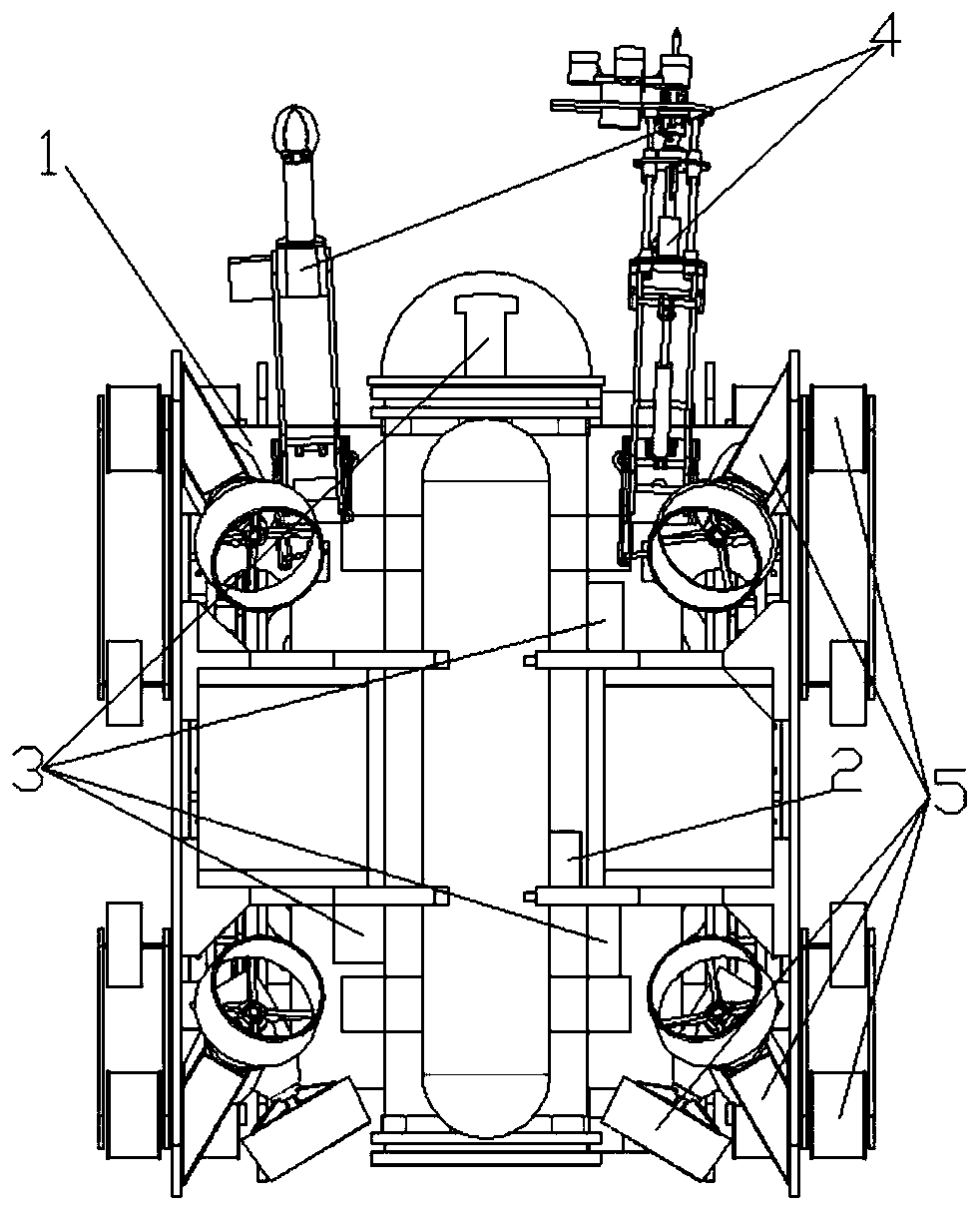
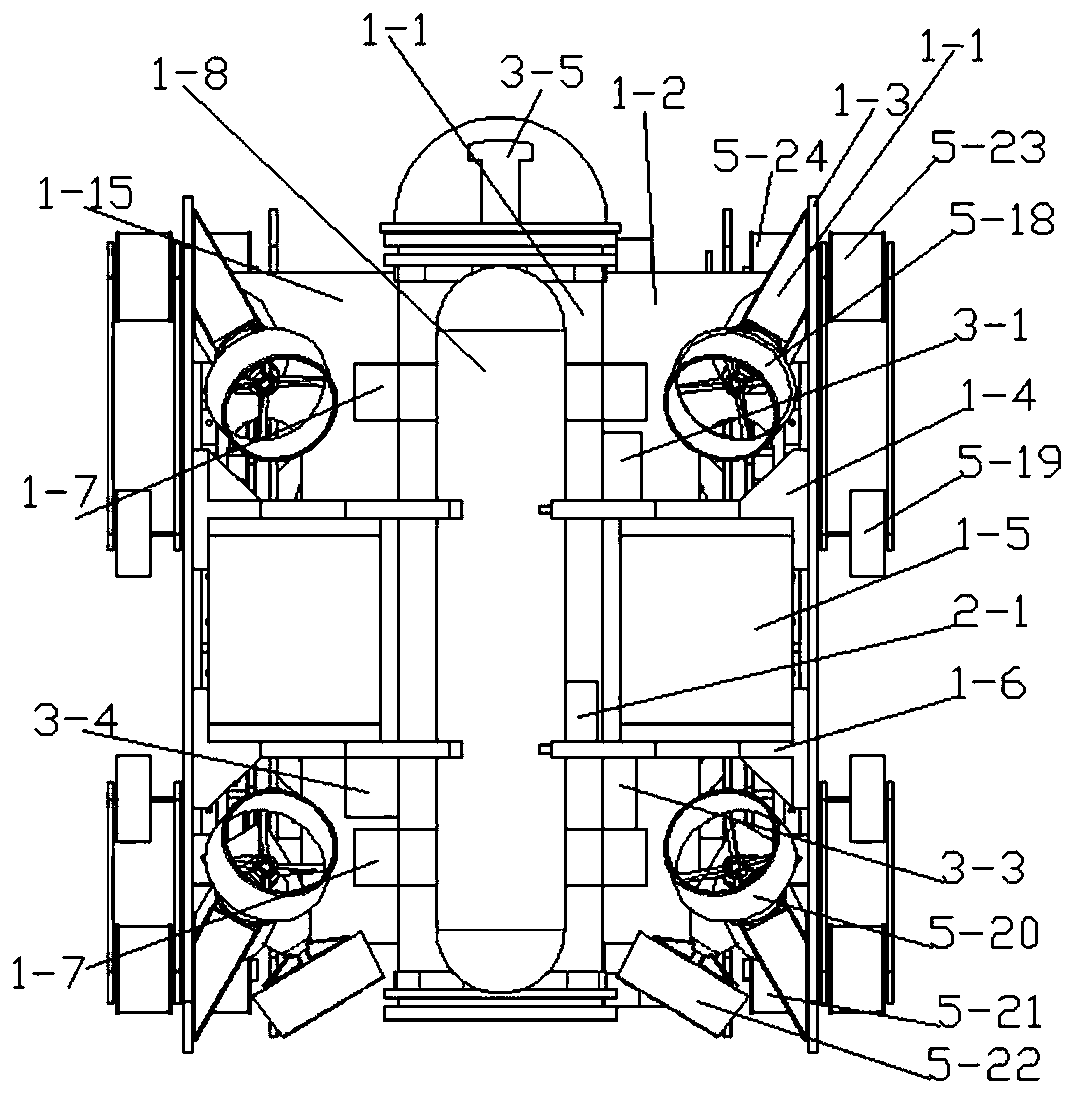
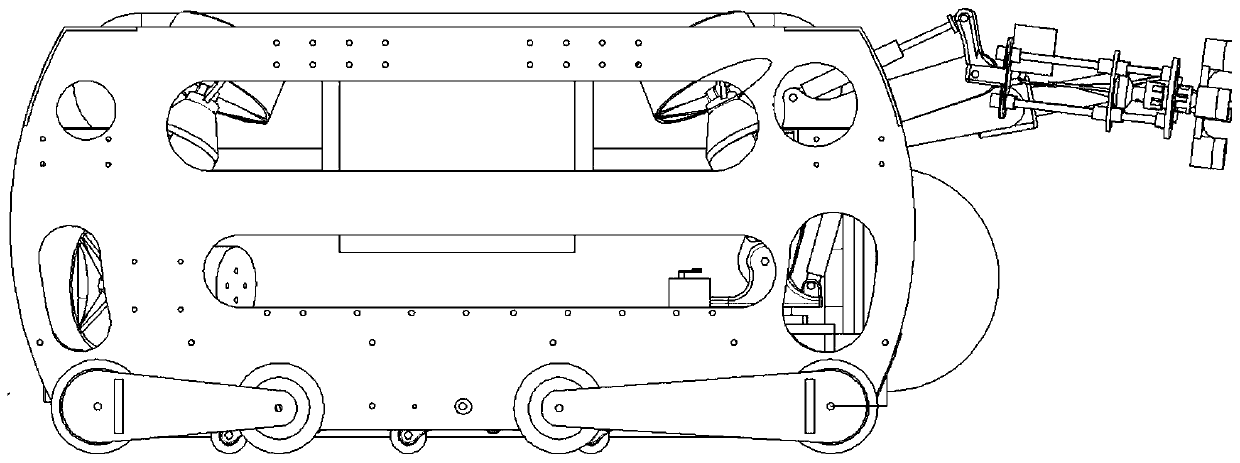
[0049] see Figure 1-13 , the present invention provides a technical solution: a multifunctional six-track underwater robot, which includes a six-track underwater robot main body 1, and a positioning and navigation system 2 arranged on the six-track underwater robot main body 1 , an intelligent monitoring system 3, an intelligent maintenance system 4 and a crawler-type waterway and land dual-purpose intelligent operation and pushing system 5, characterized in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More