

Path deviation correction method for AGV based on double PID control
A car and controller technology, applied in the direction of attitude control, non-electric variable control, control/adjustment system, etc., can solve problems such as difficult and retrograde changes, high cost, and increase peripheral auxiliary magnetic nails to cooperate with positioning functions, etc., to achieve increased Stability and operational flexibility, small error, and the effect of suppressing its own defects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
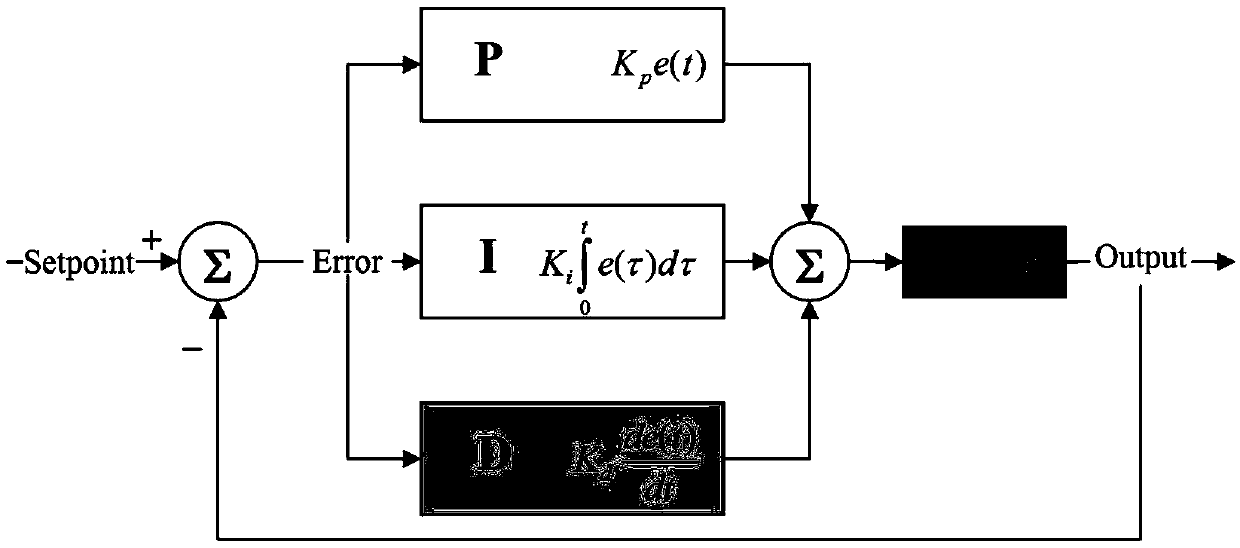
[0032] The embodiment of the present invention provides a path correction method for an AGV trolley based on dual PID control to solve the error accumulation problem existing in the existing single AGV control technology based on inertial navigation correction. The AGV system of the present invention uses inertial elements as the main Navigation a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More