

Trajectory tracking control method based on parameter optimization and used for reconfigurable modularized flexible mechanical arm
A technology of flexible manipulators and control methods, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of reduced precision and low reusability, achieve increased reusability, good robustness, and are suitable for widespread promotion Applied effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
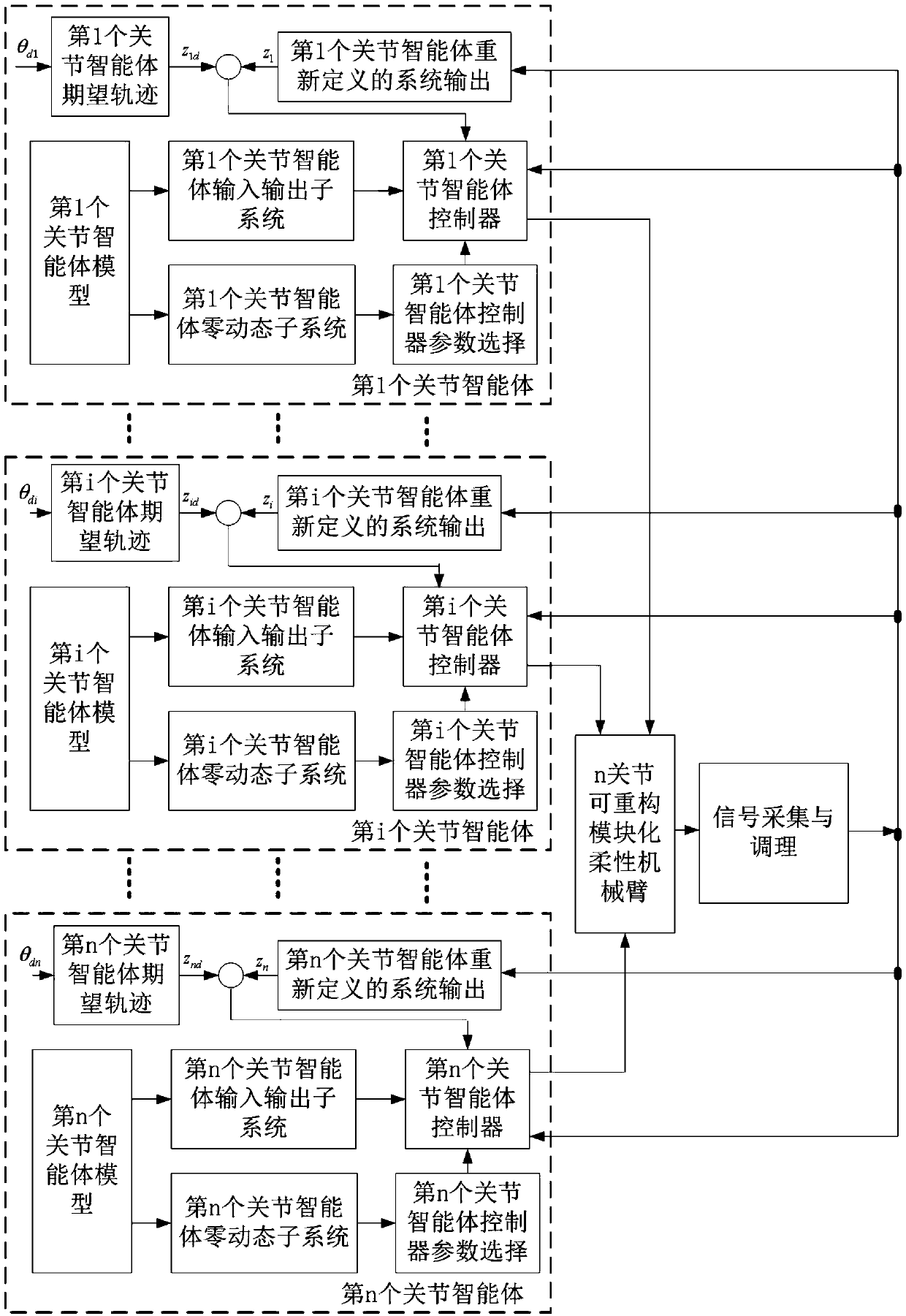
[0021] Such as figure 1As shown, the trajectory tracking control method of the reconfigurable modularized flexible manipulator based on parameter optimization in the present invention is composed of the ith (i takes a natural number, i=1,2,...,n) joint agent model, the i joint Intelligent body input and output subsystem, i-th joint intelligent body zero dynamic subsystem, i-th joint intelligent body controller, i-th joint intelligent body controller parameter selection, signal collection and conditioning, i-th joint intelligent body expectation The trajectory is implemented with the system output of the i-th joint agent redefinition.
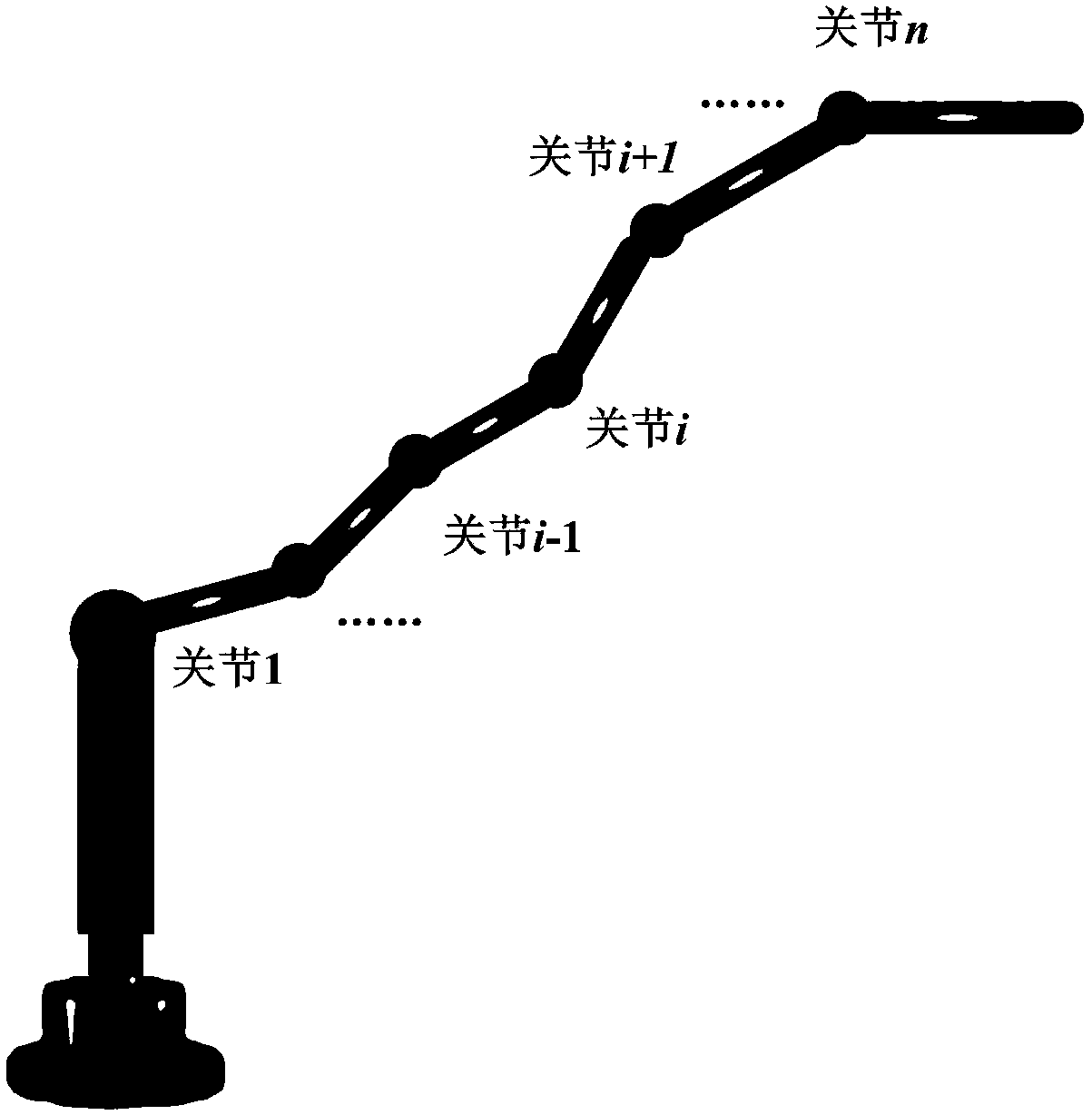
[0022] The reconfigurable modular flexible manipulator considers each joint as an intelligent body subsystem, considers the parameter uncertainty of the system and external interference and other facto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More