

Map element extraction method of automatic mapping robot
A technology of element extraction and robotics, applied in the field of navigation, can solve the problems of large-scale application of high-precision maps, difficulty in achieving accuracy and calculation speed, etc., and achieve the effect of promoting large-scale application, simple implementation, and short time-consuming
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the embodiments shown in the accompanying drawings.
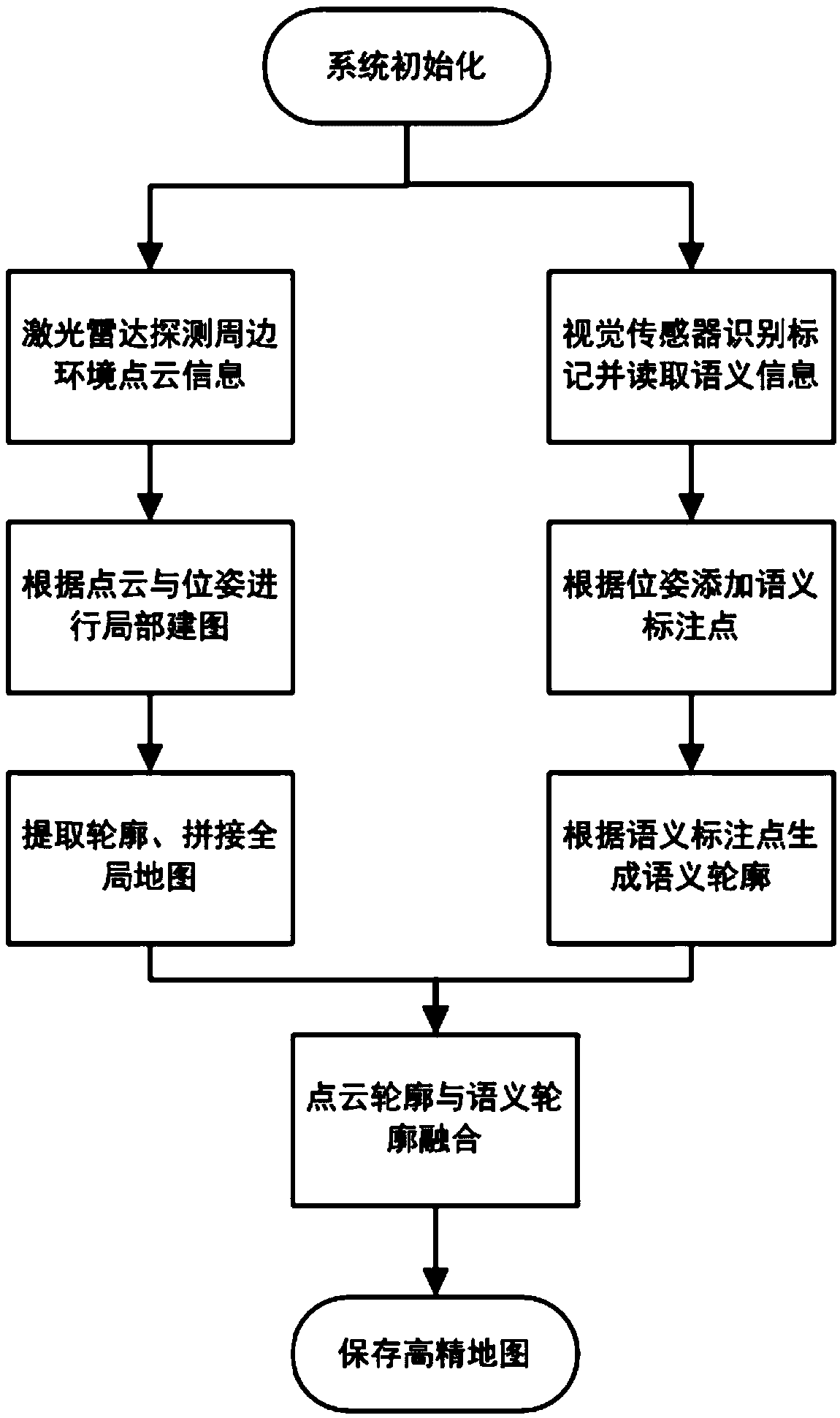
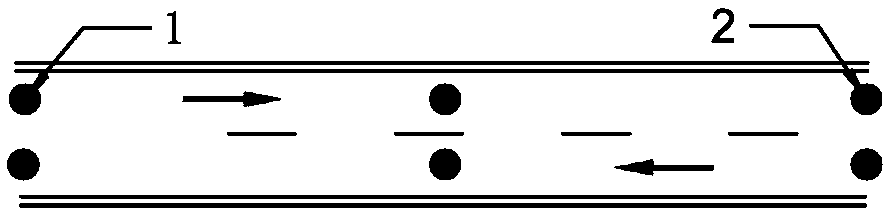
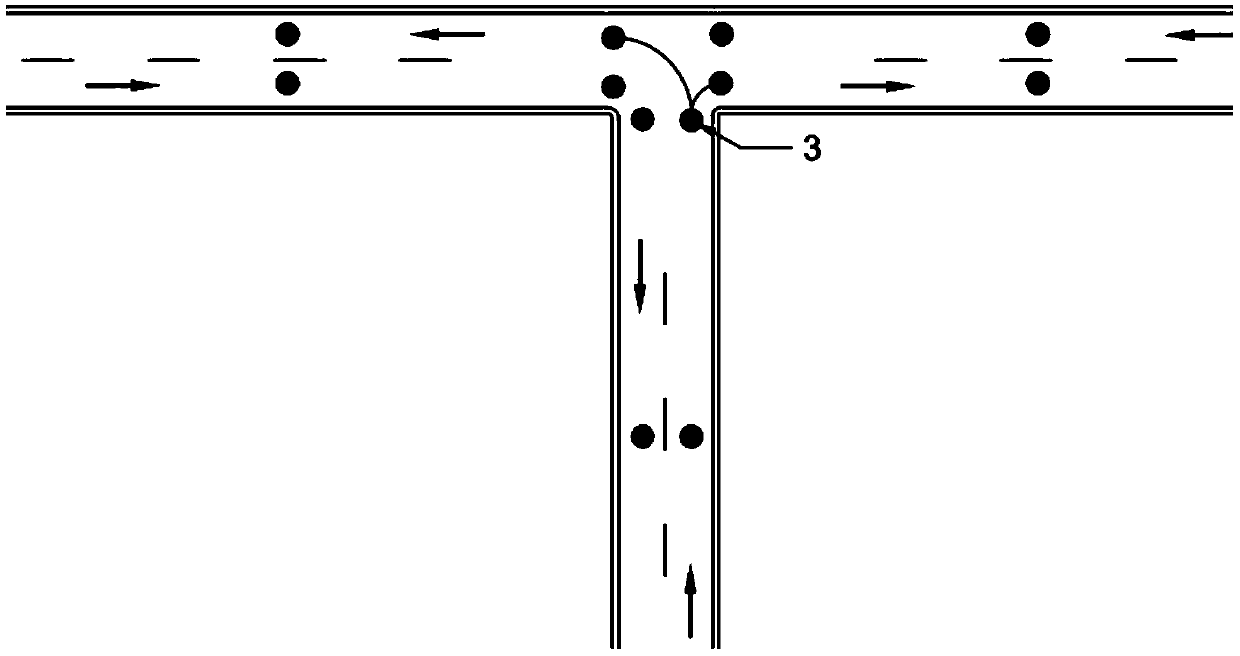
[0024] The invention proposes a method for extracting map elements of an automatic mapping robot. The method is based on a visual sensor and a laser radar, and is aimed at extracting map elements of a high-precision map for the automatic mapping robot. The first map element information of the environment to be tested is used to construct the point cloud outline map of the environment to be tested; the visual marker on the set position of the environment to be tested is detected, and the second map element information contained in the acquired visual marker is read ; Mark the second map element information into the point cloud outline map to obtain a map containing specific semantic information; wherein, the first map element information includes the point cloud information of the location of the environment to be tested; the second map element i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More