

Unmanned aerial vehicle laser navigation system based on position sensitive detector
A laser navigation and UAV technology, applied in the field of UAV navigation, can solve the problem that the navigation process is easily affected by light, distance, exposure, background, etc., the GPS/IMU navigation positioning accuracy is insufficient, and the detection angle of the four-quadrant photoelectric sensor is small. and other problems, to achieve the effect of wide detection angle, high miniaturization, and avoiding external interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
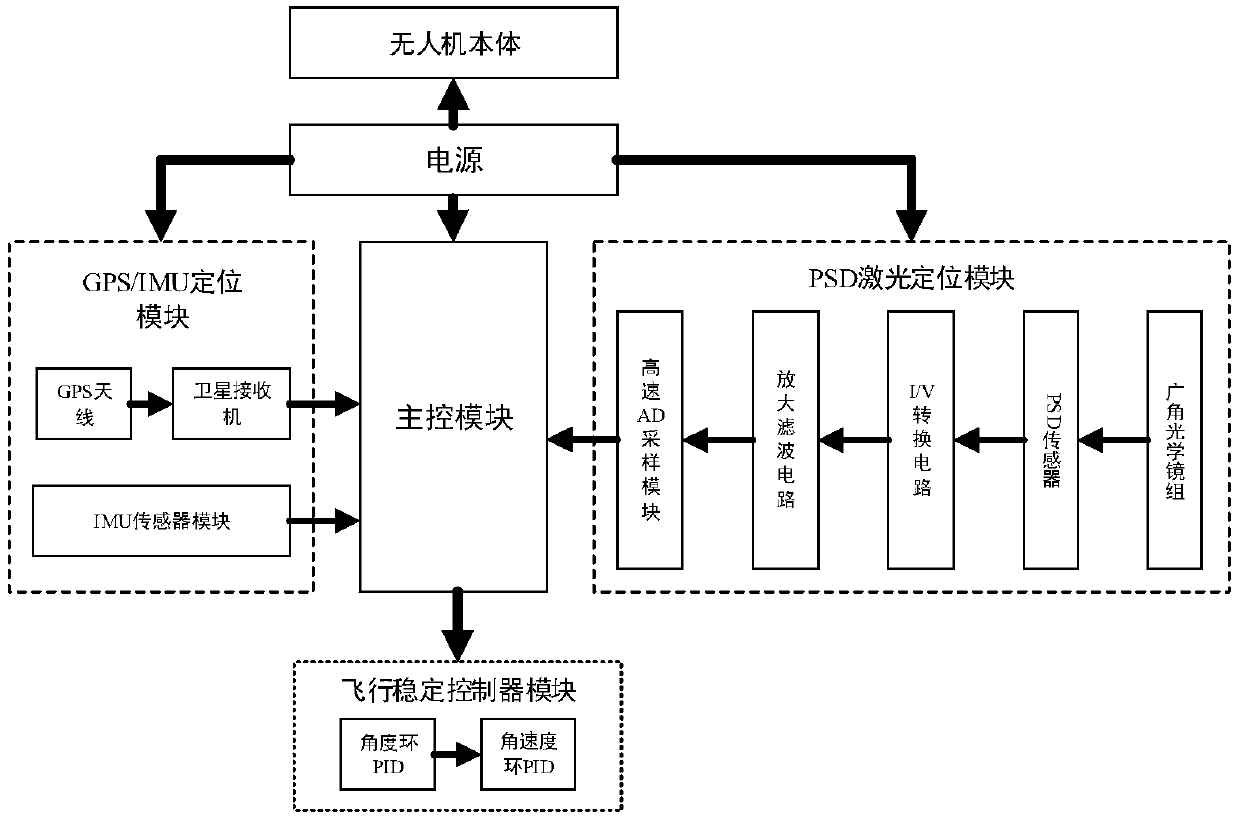
[0030] combine figure 1 , The present invention provides a UAV laser navigation system based on a position-sensitive detector, including a UAV body, a power supply, a GPS / IMU positioning module, a PSD laser positioning module, a main control module and a flight stability controller module. in:
[0031] (1) The power supply supplies power to the GPS / IMU positioning module, the PSD laser positioning module, the main control module and the flight stability controller module.
[0032] (2) The GPS / IMU positioning module is installed on the unmanned aerial vehicle body, and is made up of GPS antenna, satellite receiver and IMU sensor module, and wherein satellite receiver is connected with GPS antenna, main control module respectively by signal line, and The satellite positioning signal is received through the GPS antenna, and the signal is transmitted to the main control module. The IMU sensor module is connected to the main control module through the signal line, and the acceler...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More