

Robot system for autonomous quality measurement of multi-band channels
A channel quality measurement and robotic system technology, applied in the field of robotic systems, can solve problems such as high error rate, low efficiency of manual channel quality measurement, and inability to realize the combination of computer control and channel quality measurement, so as to reduce error rate and improve versatility and flexibility, improving efficiency and precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
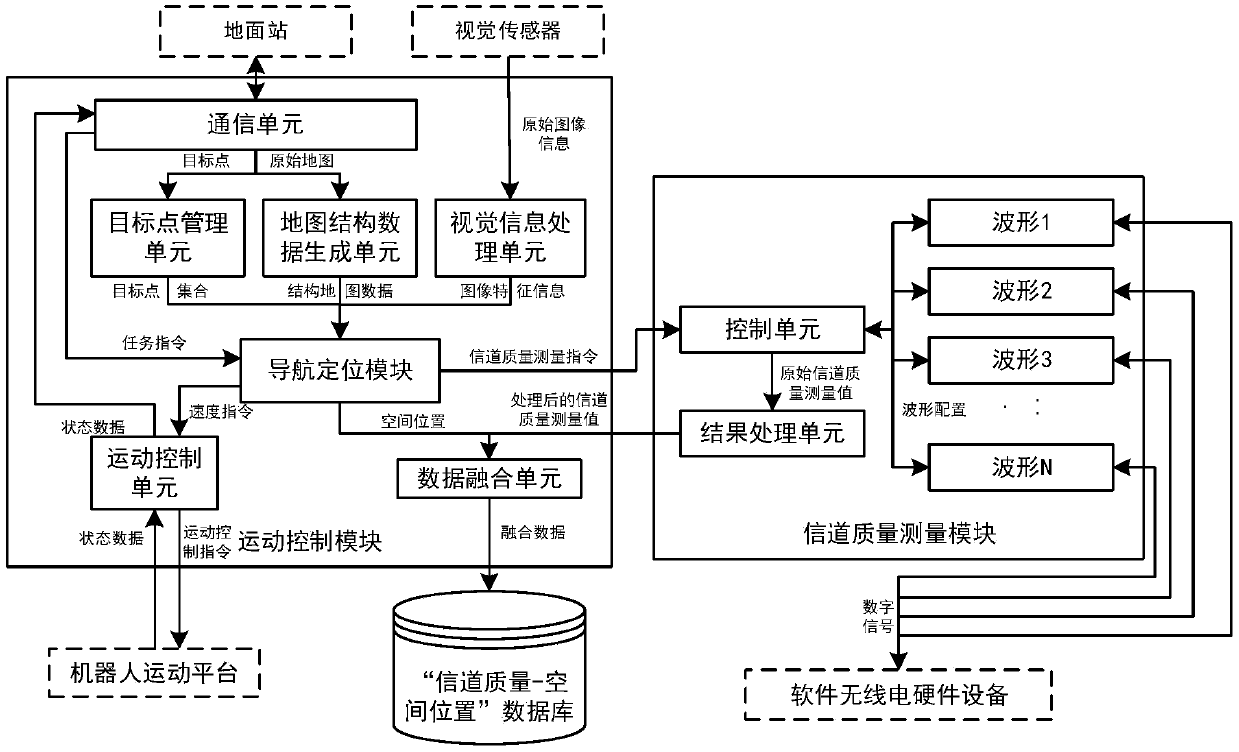
[0045] figure 1 Shown is the overall design block diagram of the present invention. The entire system is composed of a motion control module and a channel quality measurement module. figure 1 In, the communication unit interacts with the ground station information; the visual sensor outputs the original image information to the visual information processing unit; the discrete target points transmitted from the ground station pass through the target point management unit to generate a target point set; the original map information passes through the map structure data generating unit Generate structured map data; input target point set, structured map data and image feature information into navigation and positioning module, output spatial position, speed command and channel quality measurement command; spatial position and processed channel quality measurement output from the result processing unit The value is input to the data fusion unit; the channel quality measurement instru...
Embodiment 2
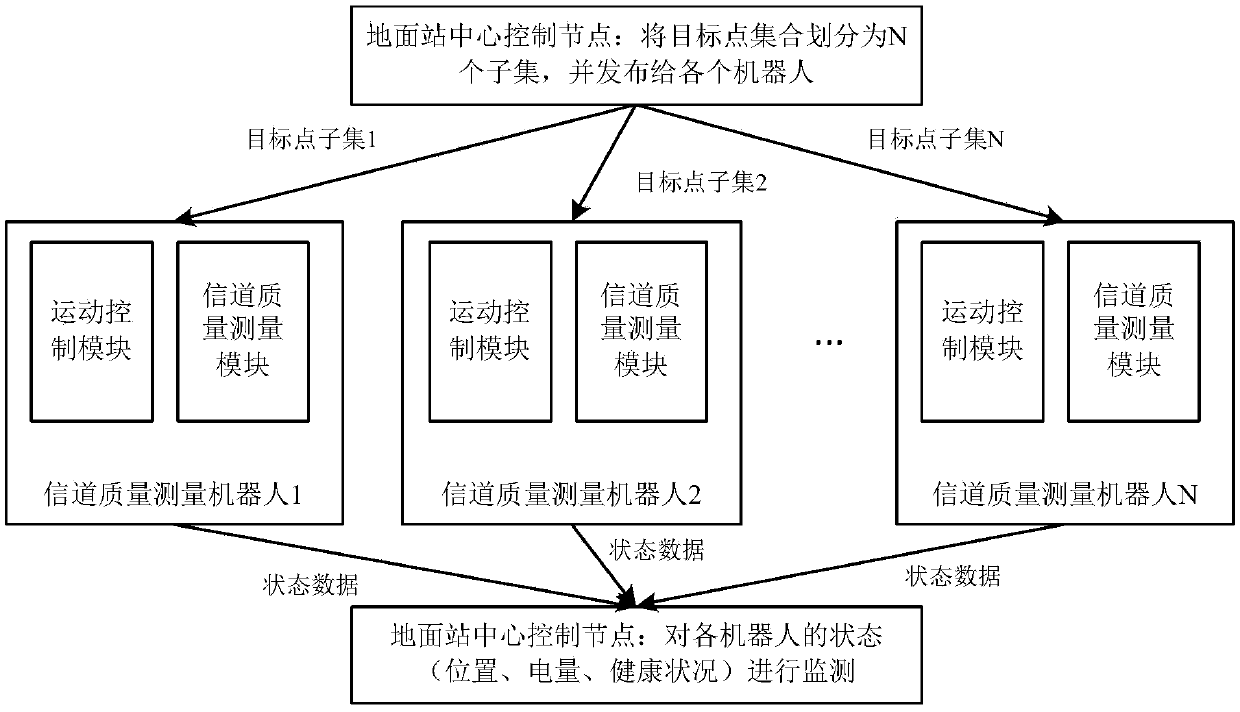
[0050] The invention can be more intuitively extended to the situation of multiple robots.
[0051] image 3 Shown is a schematic diagram of the extension of the present invention to multiple robots. The extension adopts a central control mechanism, and the central control node of the ground station is responsible for task allocation. Specifically, the target point set is divided into N target point subsets according to the principle of load balancing (assuming the number of robots is N), and each The subset is sent to the corresponding channel quality measurement robot. From the perspective of each robot, there is no essential difference from the single case. The central control node of the ground station is responsible for tracking the robot's status, handling dynamic conditions, and avoiding collisions.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More