

Unmanned aerial vehicle visual guidance air refueling method based on deep learning
A deep learning and vision-guided technology, applied in computer parts, image data processing, instruments, etc., can solve problems such as the relative position is not fixed, the bandwidth of the GPS system is not required frequency, and the sensor is difficult to meet the requirements of the air refueling docking section, etc. To achieve the effect of improving accuracy and real-time performance, and enhancing anti-interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The invention will be described in further detail below in conjunction with the accompanying drawings.
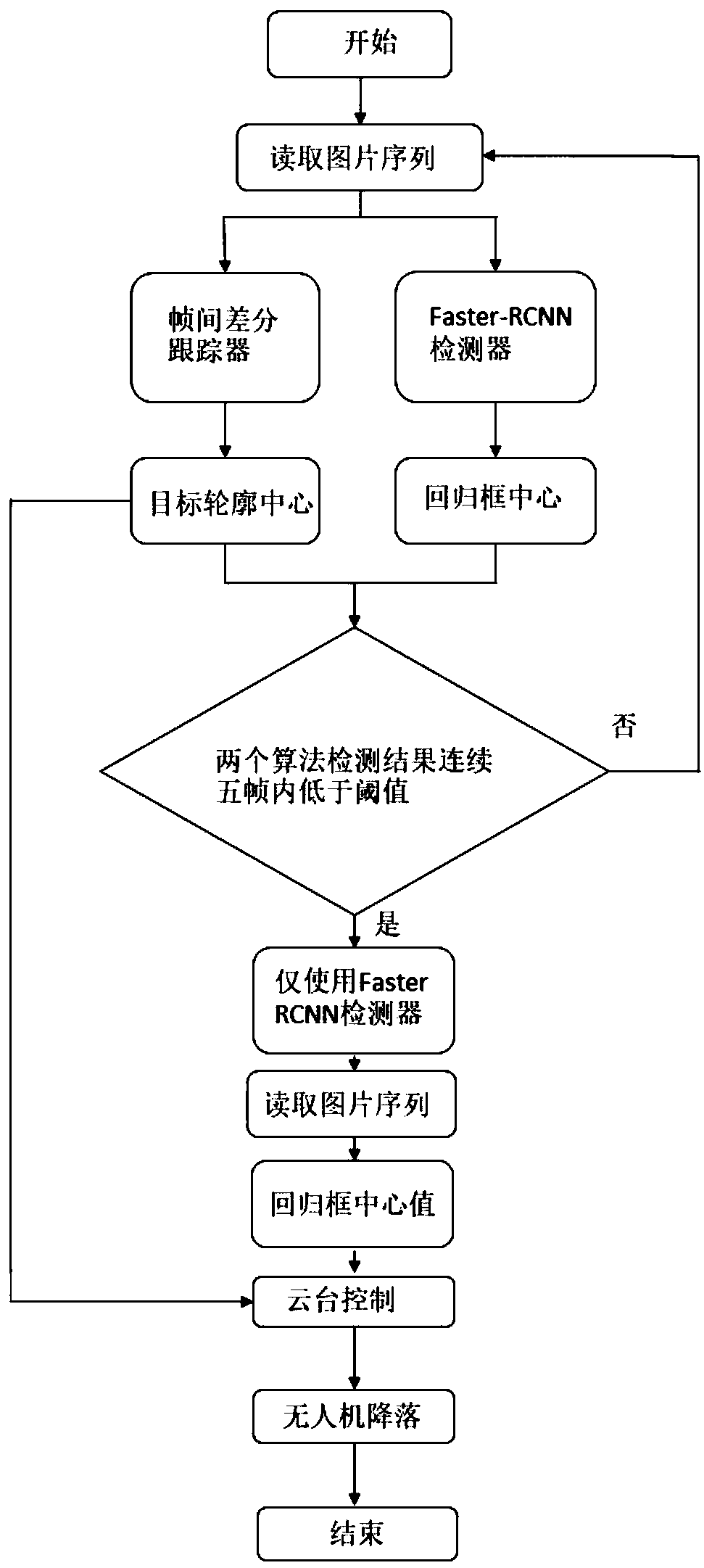
[0036] figure 1 The flowchart is realized for the whole of the present invention.
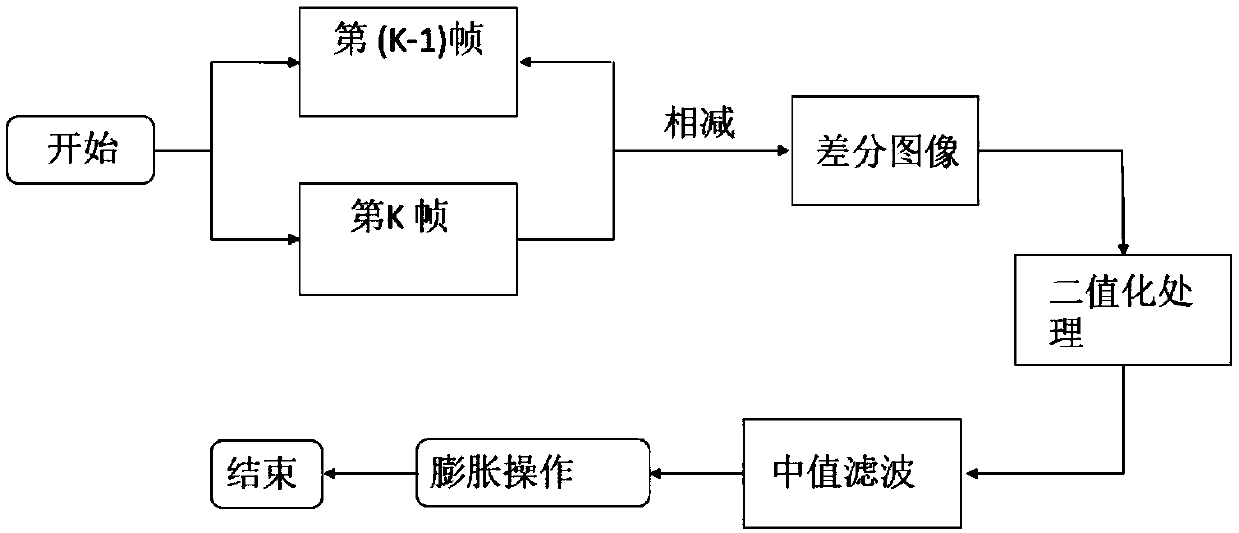
[0037] Step 1: Use the method of frame difference to identify and track the moving target according to the movement of the target relative to the background.
[0038] When the tanker just entered the field of view of the camera, the target is small, and it is difficult to use the target detection algorithm based on feature extraction. At this time, the background is single, only the sky, and the complex background on the ground can be removed by taking the upper part of the image. The target detected in the difference stage is small, so after the difference, the target needs to be enhanced. A dilation operation is employed to augment the target. Dilation is an operation of image morphology, which uses a uniquely designed kernel to perform convolution operations on the entire image ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More