

Topmark map building and robot positioning method
A technology for robot positioning and map construction, applied to instruments, measuring devices, surveying and navigation, etc., can solve problems such as inaccurate map construction results, and achieve the effect of reducing deviation, weakening positioning deviation, and improving construction accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0032] In the present invention, the top label needs to be pasted on the roof where the robot needs to move, and the camera is set parallel to the roof. The camera needs to be calibrated before use to obtain the internal parameter matrix M of the camera. cam .
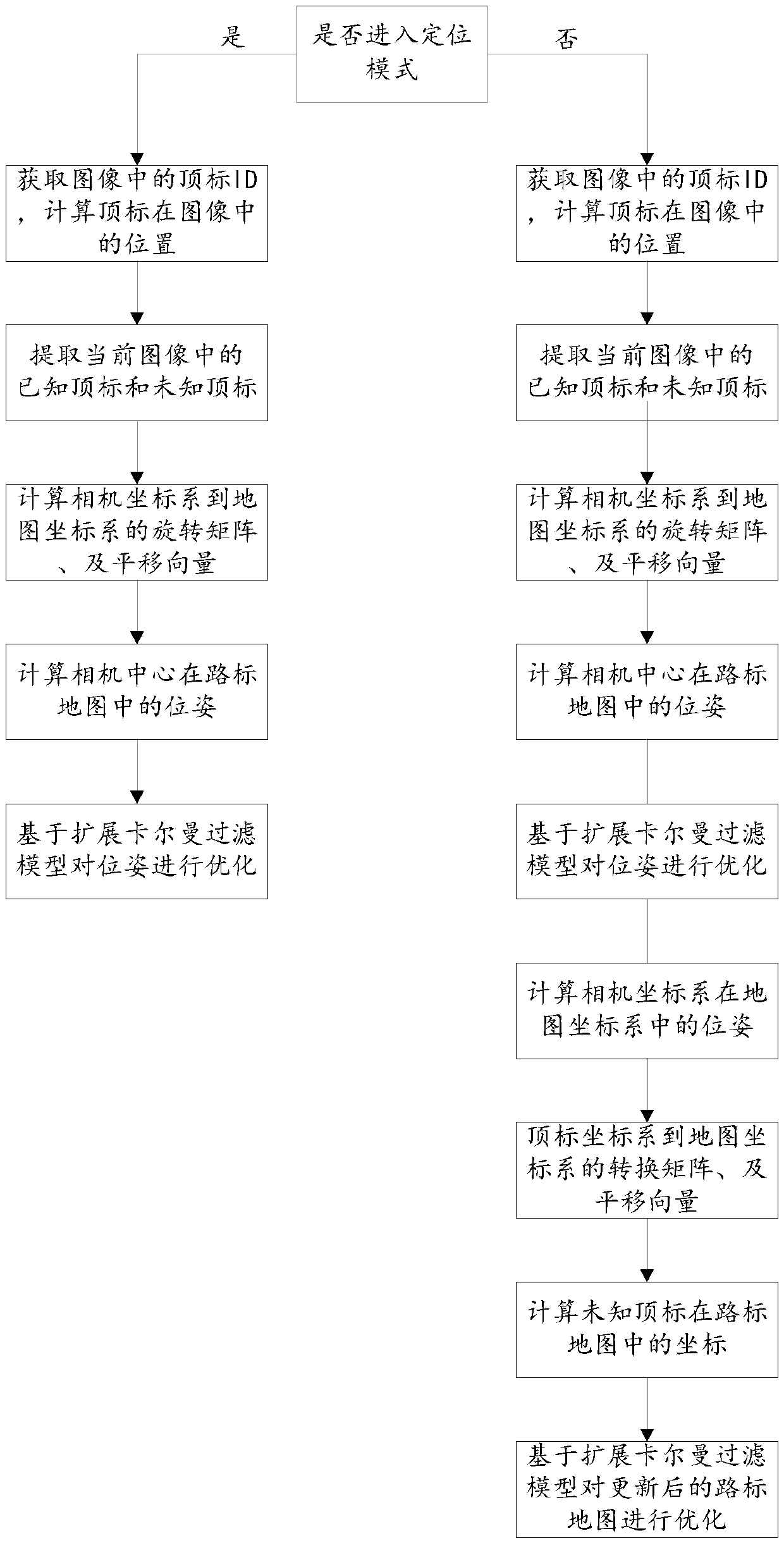
[0033] figure 1 It is a flow chart of the top-mark map construction and robot positioning method provided by the embodiment of the present invention. The method specifically includes the following steps:
[0034] S1. Judging whether to enter the positioning mode at present, if the judgment result is yes, enter the positioning mode, execut...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More