

Fuzzy volume Kalman filtering-based single-station passive navigation method
A technology of Kalman filtering and navigation method, which is applied in the field of single-station passive navigation based on fuzzy volumetric Kalman filtering, can solve problems such as large system uncertainty, human error, and environmental condition changes, and achieve system uncertainty , the effect of improving applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
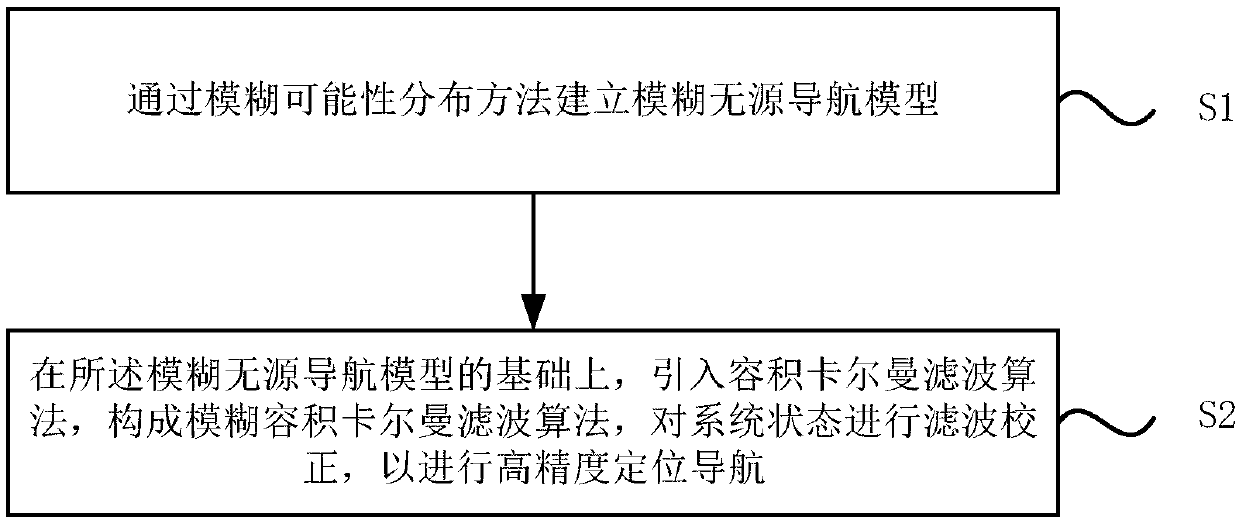
[0070] like figure 2 As shown, Embodiment 1 of the present invention provides a single-station passive navigation method based on fuzzy volumetric Kalman filtering, the method includes the following steps:
[0071] S1. Establishing a fuzzy passive navigation model through a fuzzy possibility distribution method.
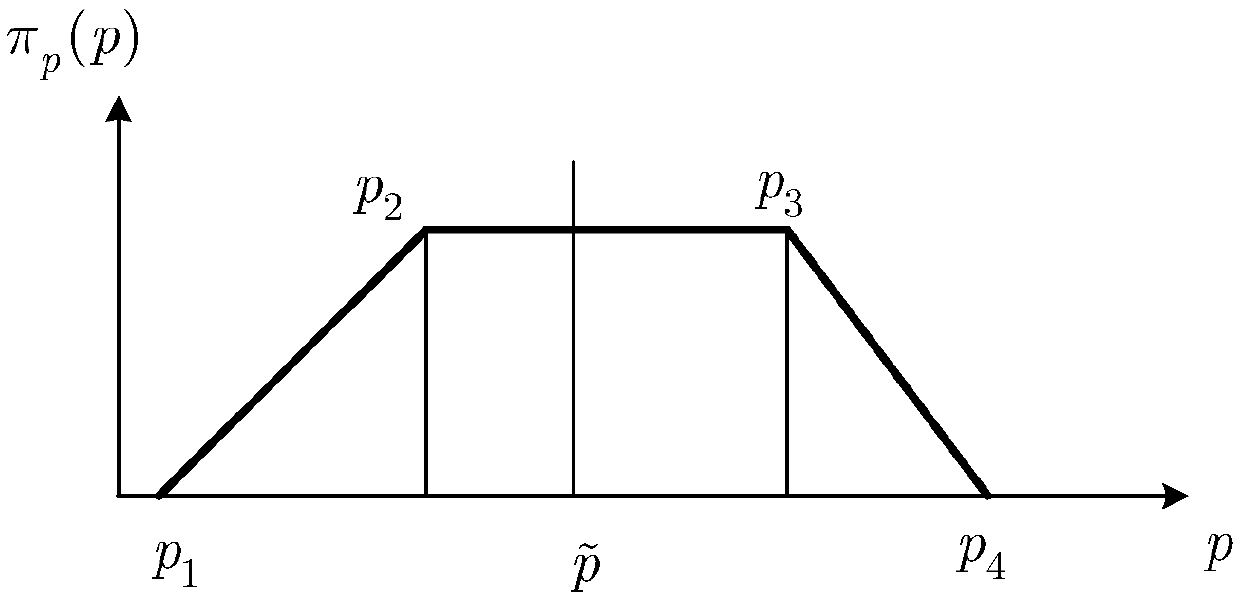
[0072] The present invention uses the commonly used trapezoidal possibility distribution function to study the problem of fuzzy single station passive positioning. Specifically, step S1 further includes:
[0073] Define the fuzzy variable p;
[0074] For a given fuzzy variable p, its possibility distribution domain P is as follows image 3 Shown as:
[0075]
[0076] And in order to calculate the fuzzy variable p, the present invention will also introduce some definitions, namely,
[0077] When the fuzzy variable p obeys the trapezoidal possibility distribution, the expectation of the fuzzy variable p is defined as:
[0078] E{p}~Π(p 1 ,p 2 ,p 3 ,p 4 ); ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More