

Power distribution station indoor equipment floor space collaborative routing inspection device and routing inspection method thereof
A technology of electrical equipment, ground and air, applied in the field of automatic inspection devices, can solve problems such as unguaranteed, affecting inspection tasks, instrumentation identification, etc., to ensure inaccurate or lost positioning, improve detection accuracy and efficiency, The effect of security assurance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
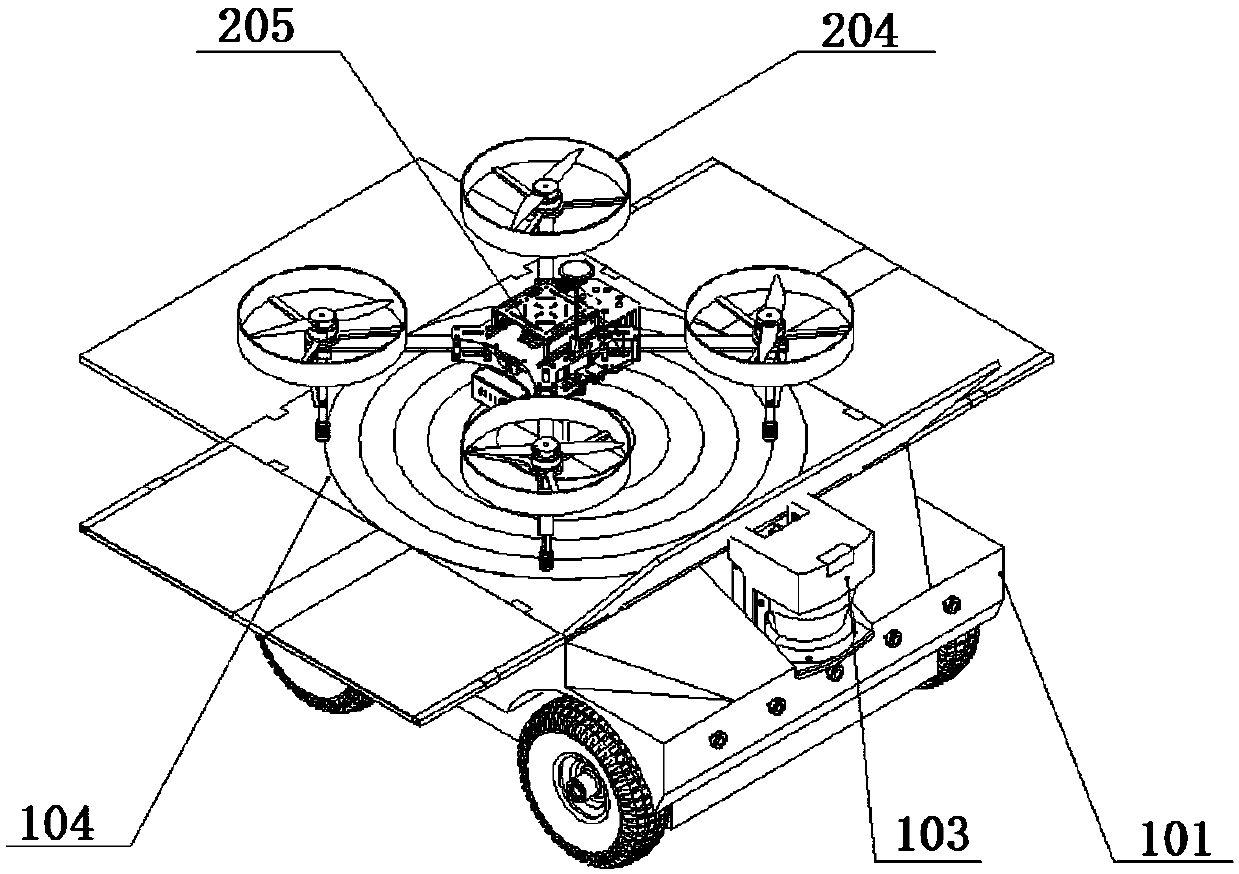
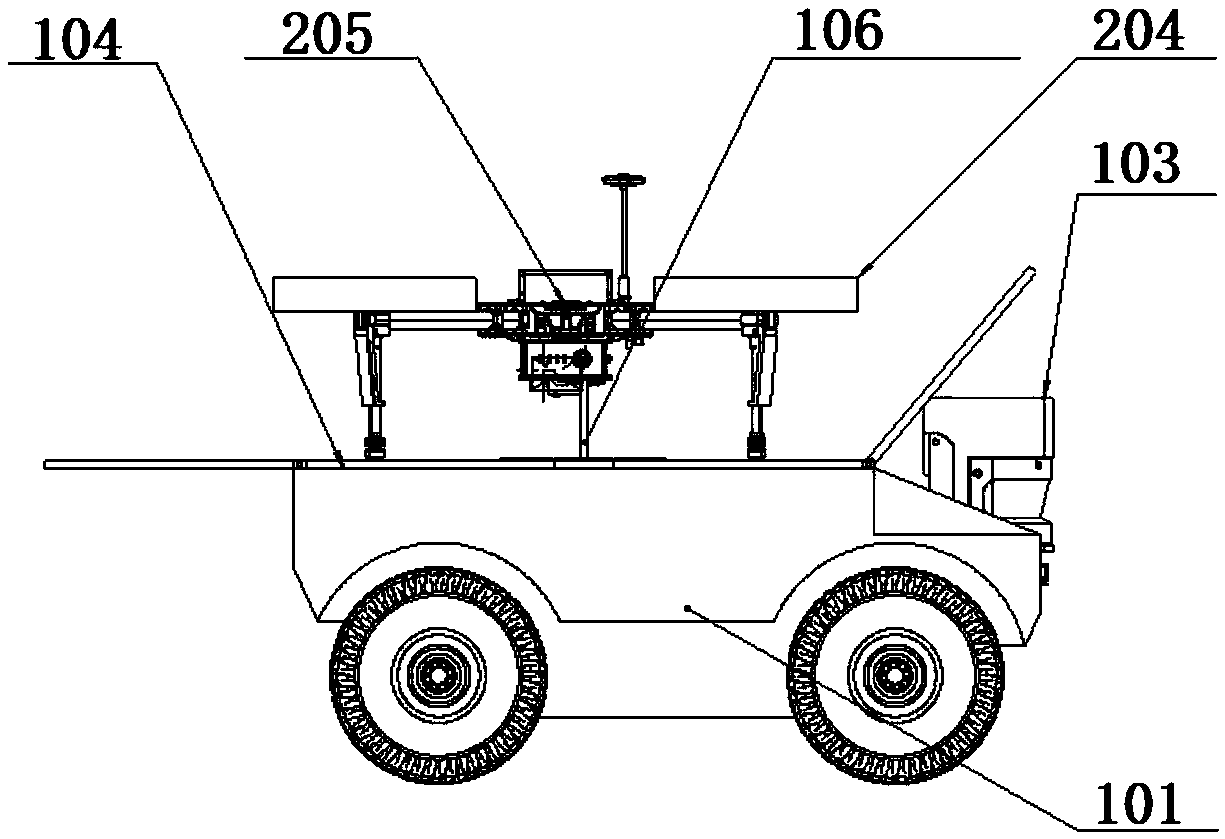
[0035] figure 2 , image 3It shows the ground-air collaborative inspection device for electrical equipment in the power distribution room. The robot adopts a four-wheel walking robot: the top of the robot body 101 is equipped with an apron 104 for the unmanned aerial vehicle to take off and land. The positioning mark 105 for the UAV to determine the position, the ultrasonic sensor 102 and the laser sensor 103 (ie laser radar) are installed on the front of the robot body 101; The protective case 204 has a UWB positioning label 205 on its top, and a landing gear 202 on its lower part; the inspection equipment 201 (with a camera on it for taking pictures) for power distribution room inspection is installed on the drone; The robot and the drone are connected through a retractable cable 206, and the retractable cable 206 is connected to the electric reel installed on the robot body 101. It is composed of the UAV power line for power supply and the communication line between the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More