

Intelligent material carrying mechanical arm and carrying method
A technology of intelligent materials and manipulators, applied in the direction of conveyor objects, transportation and packaging, etc., can solve the problems of increasing material transfer costs, affecting handling efficiency, and many types of manipulators, so as to improve grasping efficiency and accuracy, grasping position Accuracy and the effect of improving clamping efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
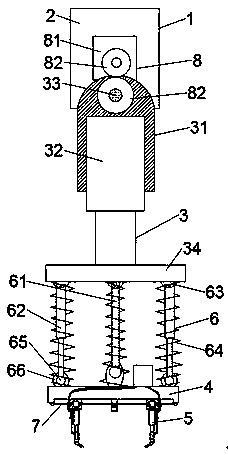
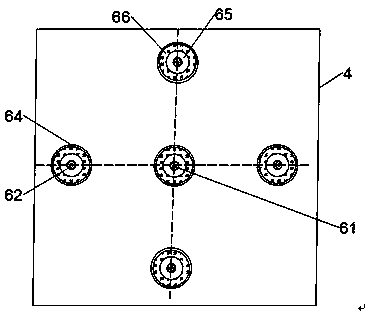
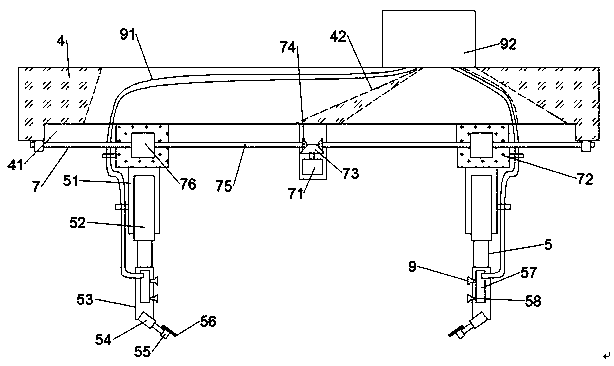
[0047] Such as Figure 1 to Figure 4 As shown, the present invention provides a manipulator and a handling method for intelligent material handling, including a mechanical hand 1 installed on a walking trolley. The mechanical hand 1 includes a first support arm 2, a second extension arm 3, a mechanical palm 4 and the four-finger grasping device 5, the first support arm 2 is located at the top, and the top of the first support arm 2 is directly connected to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More