

Robot system based on optical neural network
A robot system and neural network technology applied in the field of mechatronics to achieve high real-time performance, simple structure and low interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
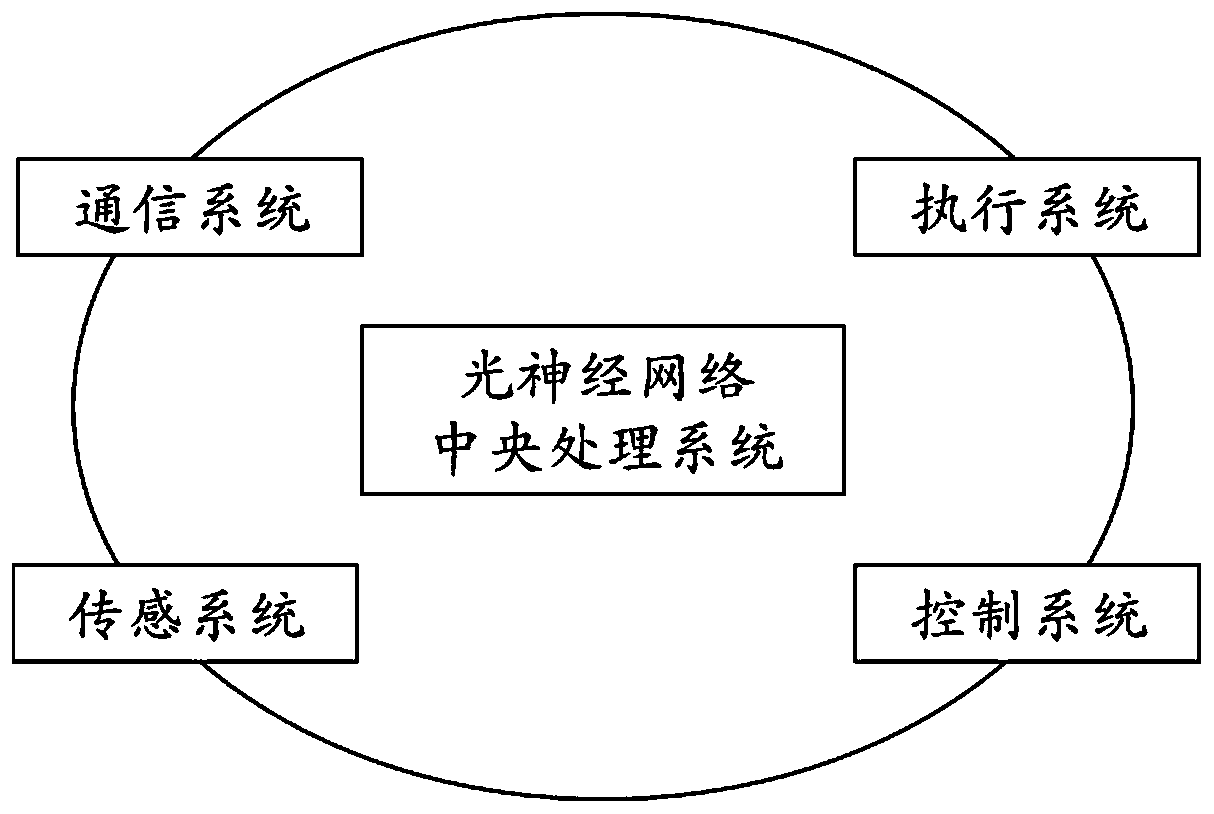
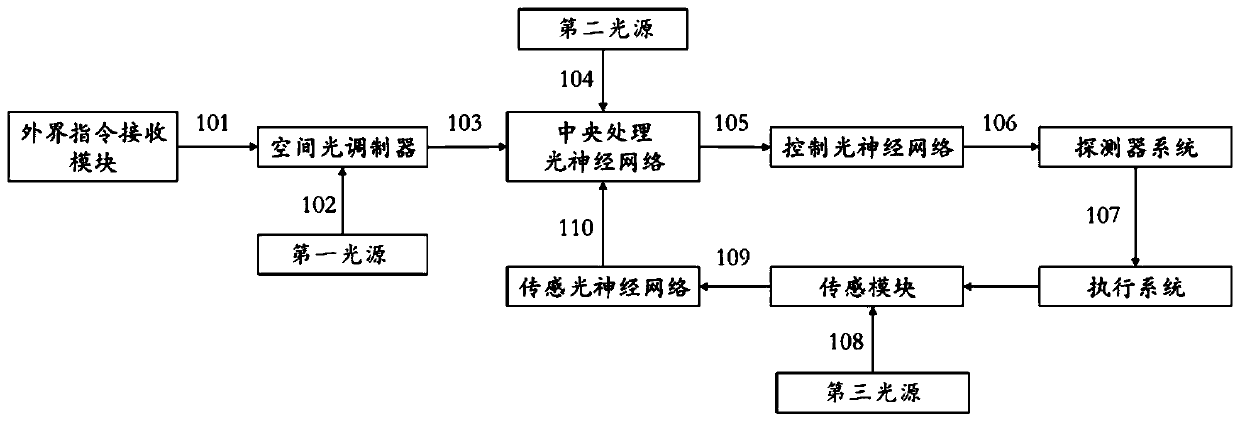
[0045] see figure 1 and figure 2An embodiment of the robot system based on the optical neural network provided by the present invention includes a communication system, an optical neural network central processing system, a control system, an execution system and a sensing system. The communication system includes an external command receiving module and an internal signal transmission module mainly based on optical fiber. The external command receiving module is used to receive external commands transmitted to the robot system. The internal signal transmission module based on the optical fiber network is used to transmit optical signals between various hardware. In order to improve the transmission rate of optical signals, an optical signal amplification device is configured in the optical fiber network. The optical neural network central processing system includes a first light source, a spatial light modulator, a second light source, a central processing optical neural n...
Embodiment 2
[0052] Embodiment 2: The sensing optical neural network and control optical neural network in the present invention can be integrated into the central processing optical neural network, see Figure 5 . The central processing optical neural network also has the functions of computing sensory information, computing control information, and computing current decisions. The output light 203 of the spatial light modulator and the output light 208 of the sensing module are simultaneously used as the input of the central processing optical neural network. The control solution light 205 of the information. Other processes are the same as the robot system in Embodiment 1.
Embodiment 3
[0053] Embodiment 3: The present invention will be further described in detail by taking three execution systems of humanoid robots as examples below;
[0054] In this embodiment, the robot system is a humanoid robot system including upper limbs, lower limbs and eye system, see Figure 6 . The optical neural network central processing system of the robotic system is composed of three central optical neural network subsystems, optical storage devices and an interconnection network. Figure 6 The middle executive system includes upper limb drive system, upper limb mechanical system, lower limb drive system, lower limb mechanical system, eyeball drive system, and eyeball mechanical system. In this robot system, the upper limbs, lower limbs, and eyeball executive systems correspond to three control systems and three sensor systems respectively. The robot system uses a digital micromirror device to load external command information onto the output optical signal of the device.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More