

Wall-climbing robot and active adhesion control method thereof
A technology of a wall-climbing robot and a control method, applied in the field of robots, can solve the problems of reduced magnetic adhesion force, inability to quickly and accurately adjust the magnetic adhesion force of magnets, surface irregularities, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
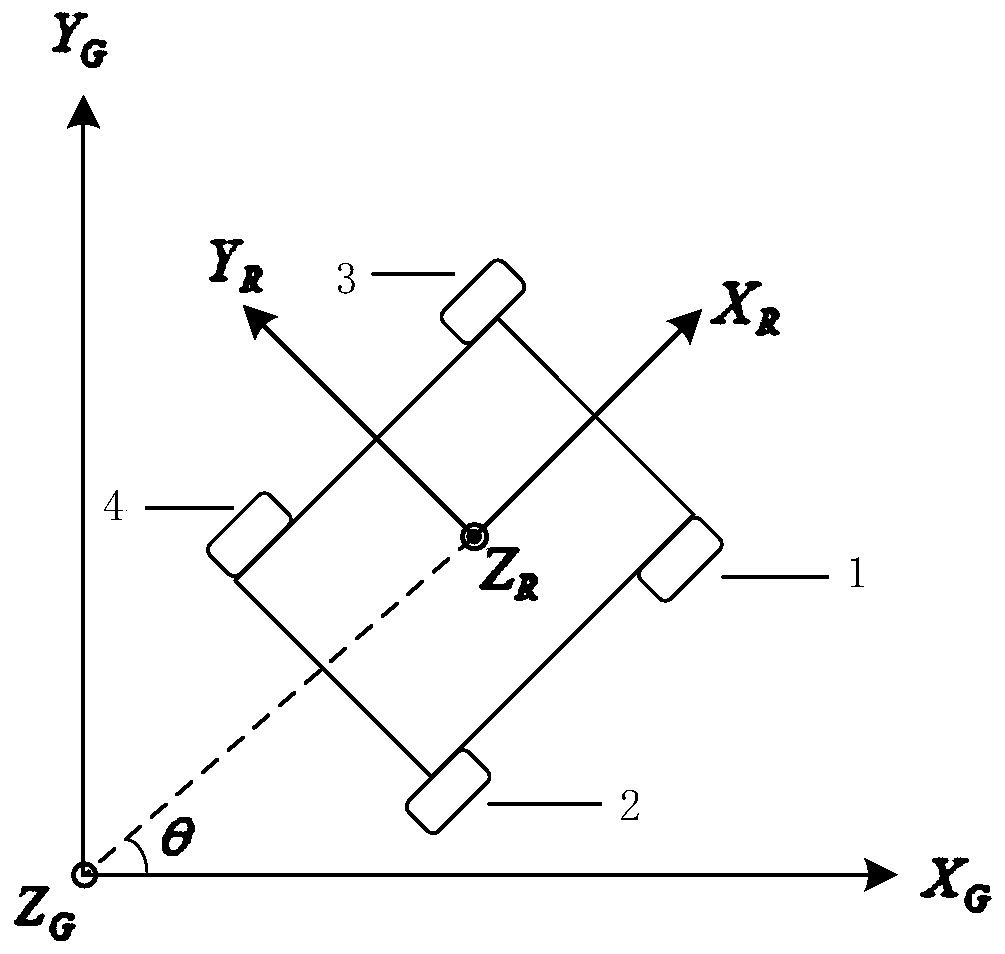
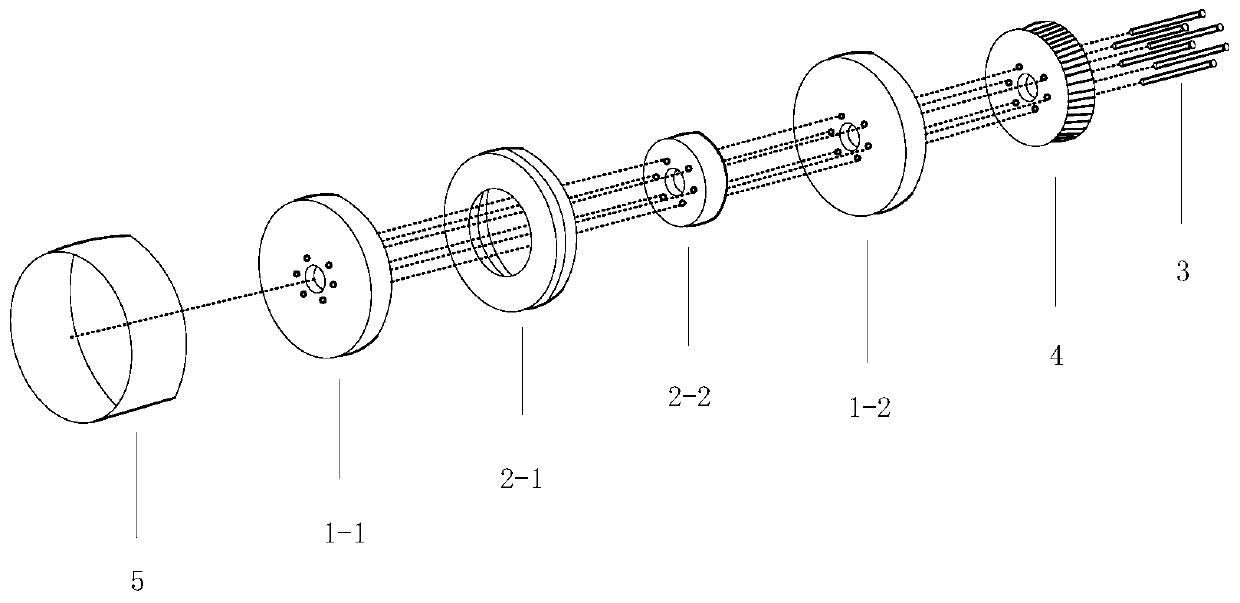
[0059] Embodiment: a kind of wall-climbing robot, as figure 1 As shown, it is characterized in that four wheels are installed on the wall-climbing robot; the four wheels are all magnetic wheels, and each magnetic wheel is composed of an annular rubidium magnet 1, a steel plate 2 and a hub 4, as figure 2 As shown; the ring-shaped rubidium magnet 1 and the steel disc 2 form a nested structure, wherein the ring-shaped rubidium magnet 1 is composed of a ring-shaped rubidium magnet I1-1 and a ring-shaped rubidium magnet II1-2, and the steel disc 2 is Consists of steel disc I2-1 and steel disc II2-2; said steel disc I2-1 and steel disc II2-2 are located between ring-shaped rubidium magnet I1-1 and ring-shaped rubidium magnet II1-2; said wheel hub 4 and ring-shaped The rubidium magnet 1 and the steel plate 2 are connected by a low-permeability screw 3; the hub 4 is outside the ring-shaped rubidium magnet II1-2.
[0060] The ring-shaped neodymium magnet 1, the steel plate 2 and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More