

PMSM inversion terminal sliding mode control method
A technology of terminal sliding mode and control method, which is applied in control systems, control generators, vector control systems, etc., can solve problems such as being easily affected by external disturbances, difficult to meet high-performance control requirements, and complex system design, etc., to achieve Improve the ability to resist load disturbance, improve steady-state performance, and improve the effect of robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, and do not limit the protection scope of the present invention.
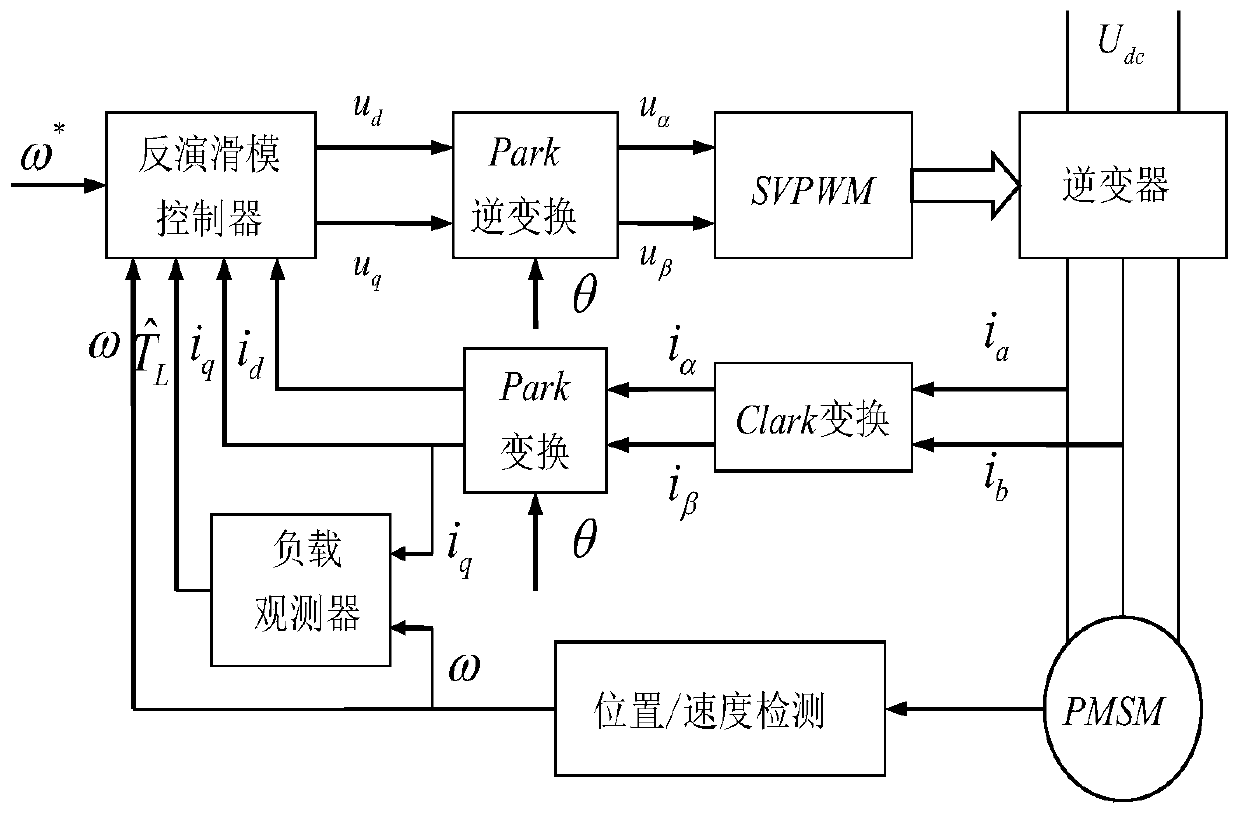
[0039] The embodiment of the present invention provides a method for PMSM inversion terminal sliding mode control. The inversion sliding mode controller outputs d-axis voltage and q-axis voltage, which are transformed into direct-axis voltage U through Park inverse transformation. a and quadrature voltage U β , through the vector control (SVPWM), it is sent to the inverter, and the inverter outputs A, B, C three-phase current, firstly through the Clark transformation, the three-phase current is transformed into a static i β and i α , i β is the current on the β axis, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More