

Duck web imitating climbing and swimming type propelling robot
A robot and duck web technology, applied in the field of robots, can solve the problems of poor hovering ability, poor maneuverability, high power consumption, etc., and achieve the effects of improving motion efficiency, simplifying structure, and high maneuverability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with the accompanying drawings, but the present invention is not limited to the following examples.
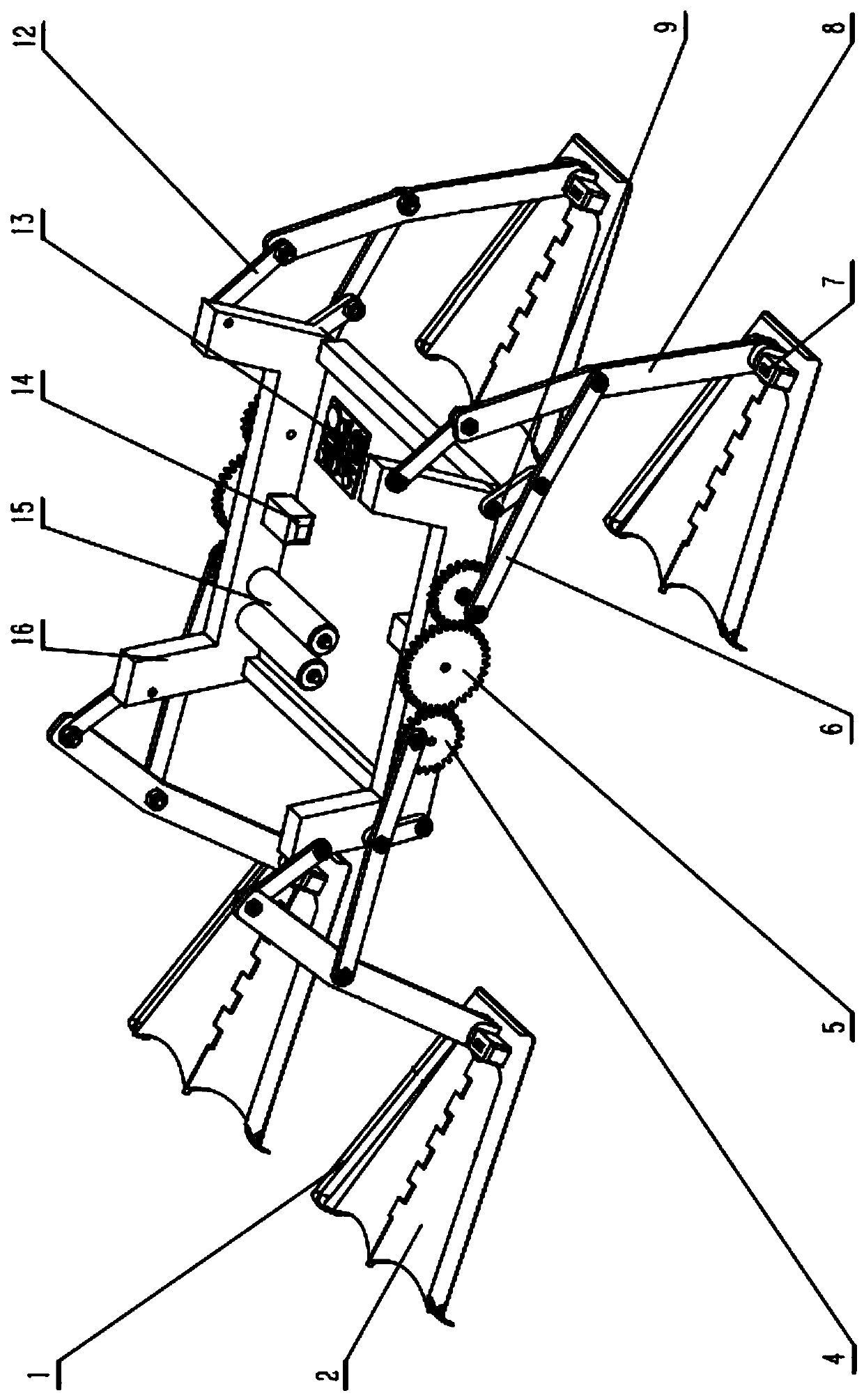
[0034] Such as figure 1 As shown, a kind of imitation duck web crawling type propelling robot, this robot comprises frame 16, and frame interior is provided with control module 13, two motors 14 and the power supply 15 for power supply, and the outside of frame is provided with two Gears and four Klann linkages with fins on each Klann linkage. The control module can receive an external control signal (wired or wireless signal), and the control module will start the motor and steering gear after receiving the control signal, so as to realize the speed regulation and steering of the robot. The model that the control module can adopt is STM32F103 with ESP8266 wireless module.
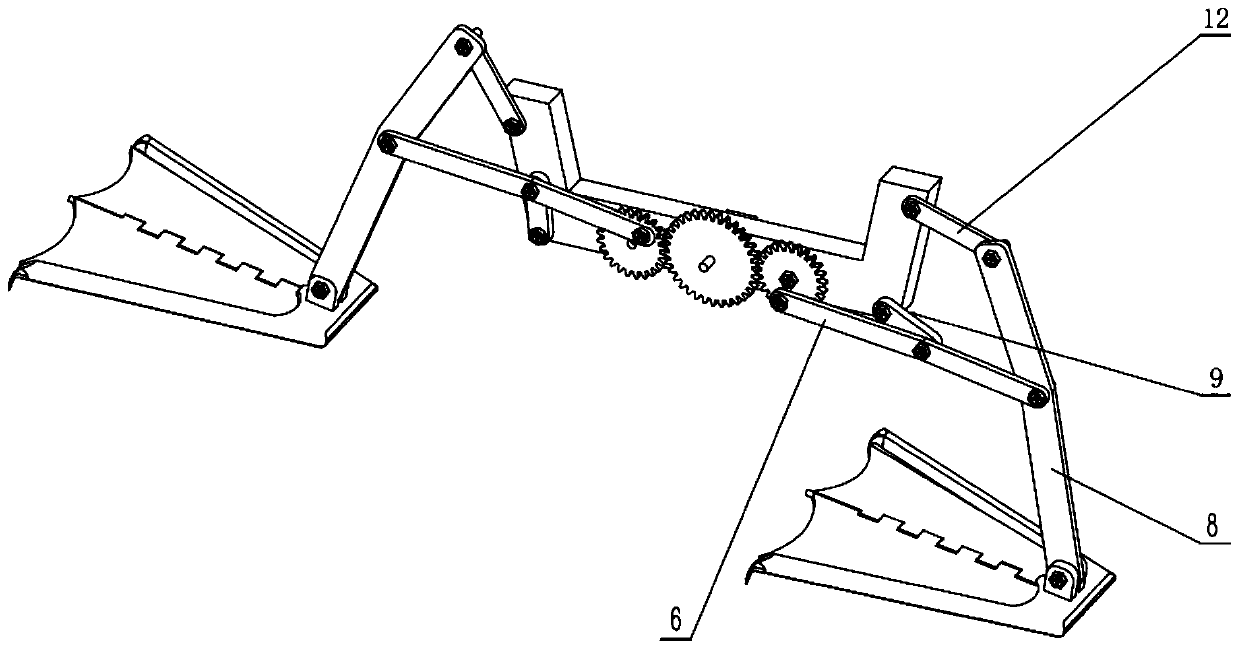
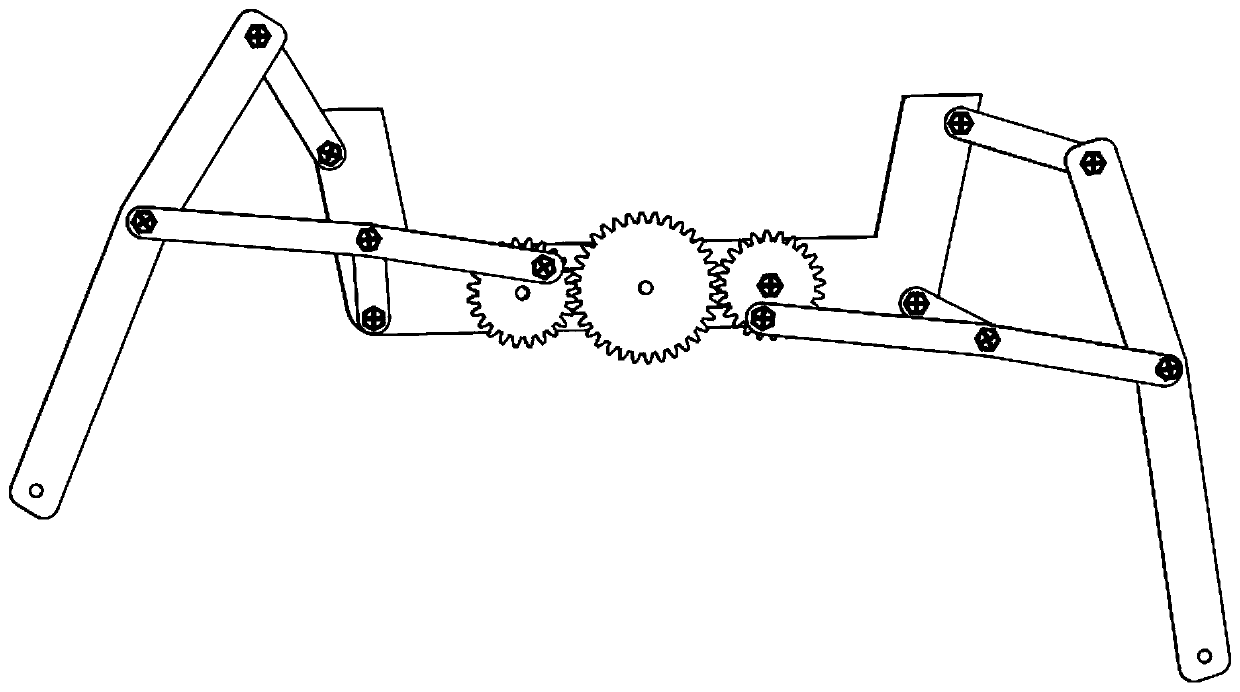
[0035] The two gear mechanisms are respectively arranged on both sides of the frame, and the Klann link mechanisms are respecti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More