

Soft actuator simulating frog tongue and application of soft actuator
A technology of actuators and software, applied in the direction of manipulators, chucks, manufacturing tools, etc., to achieve the effect of increasing the efficiency of sticking and capturing, avoiding abnormal operation, and responding quickly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
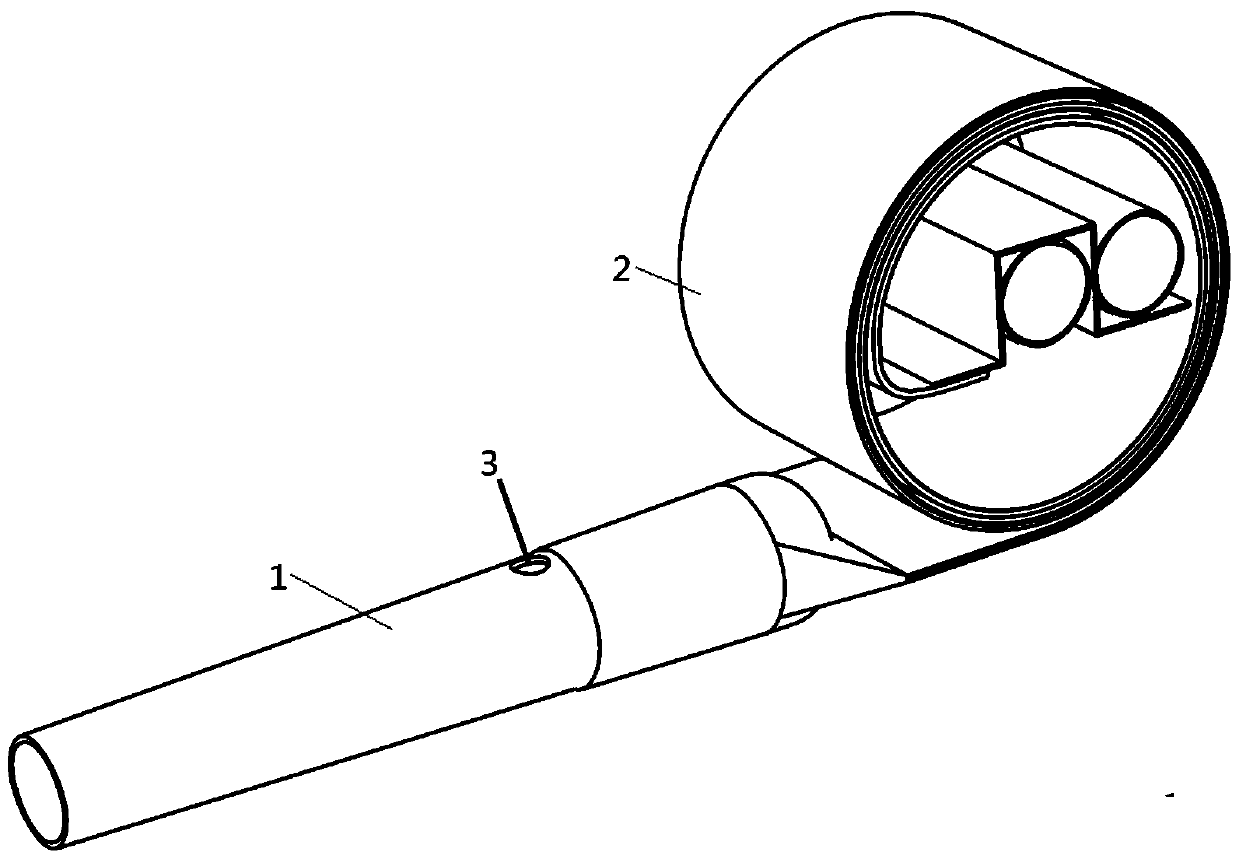
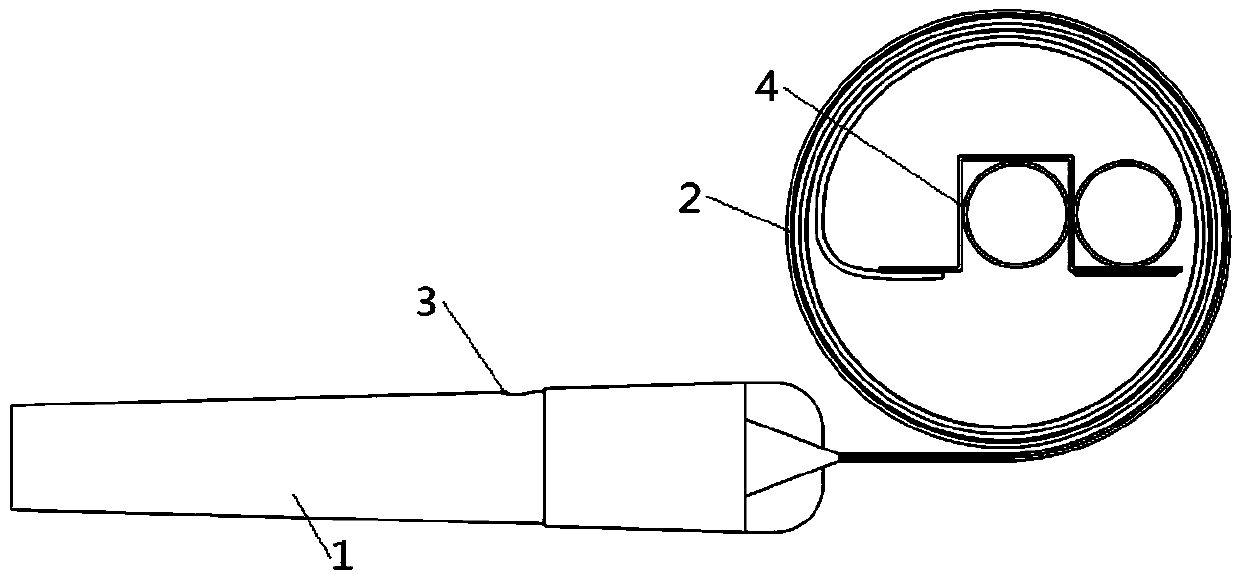
[0063] As shown in the figure, the software actuator imitating a frog tongue in this embodiment includes an inflatable tube, a support tube, a flexible film tube body, a metal wire, an end fixing piece, and an adhesive piece for grabbing objects. In this embodiment, the flexible film tube body is made of polypropylene film, and the flexible film tube body is provided with a set of connecting sides along its axial direction, and the connecting sides are parallel to each other; based on this structure, when the flexible film tube body is not inflated, it is strips.
[0064] Typically, the wire for this application is in a coiled form. In the present application, the metal wire is arranged on the inner wall of the flexible film tube body, and the flexible film tube body is driven to move by the metal wire. Based on the crimped structure of metal wire, it can usually crimp the flexible film tube, as shown in the figure. In this example, the inflation tube can be a rubber tube, a...
Embodiment 2
[0092] In order to expand the application of the actuator, on the basis of the previous actuator, the following design was made Figure 12 A soft robot that imitates a frog jumping is shown. The frog-like jumping soft robot of this embodiment includes a jumping support assembly and a robot body. There are two jumping support assemblies. The jumping support assemblies are respectively arranged on the robot body and can drive the robot body to move. The jump support assembly of this embodiment includes an inflatable tube for connecting with an air source, a support tube, a flexible film tube body, and a metal wire. In this embodiment, the flexible film tube body is made of polypropylene film, and the flexible film tube body is provided with a set of connecting sides along its axial direction, and the connecting sides are parallel to each other; based on this structure, when the flexible film tube body is not inflated, it is strips.
[0093] In this embodiment, the metal wire i...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Extended length | aaaaa | aaaaa |
| Tensile strength | aaaaa | aaaaa |
| Bending strength | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More