

Design method for unmanned surface vehicle tracking controller
A path tracking and design method technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of poor portability, complex calculation, environmental impact, etc., and achieve simplified design process, simple calculation, and Highly transplantable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
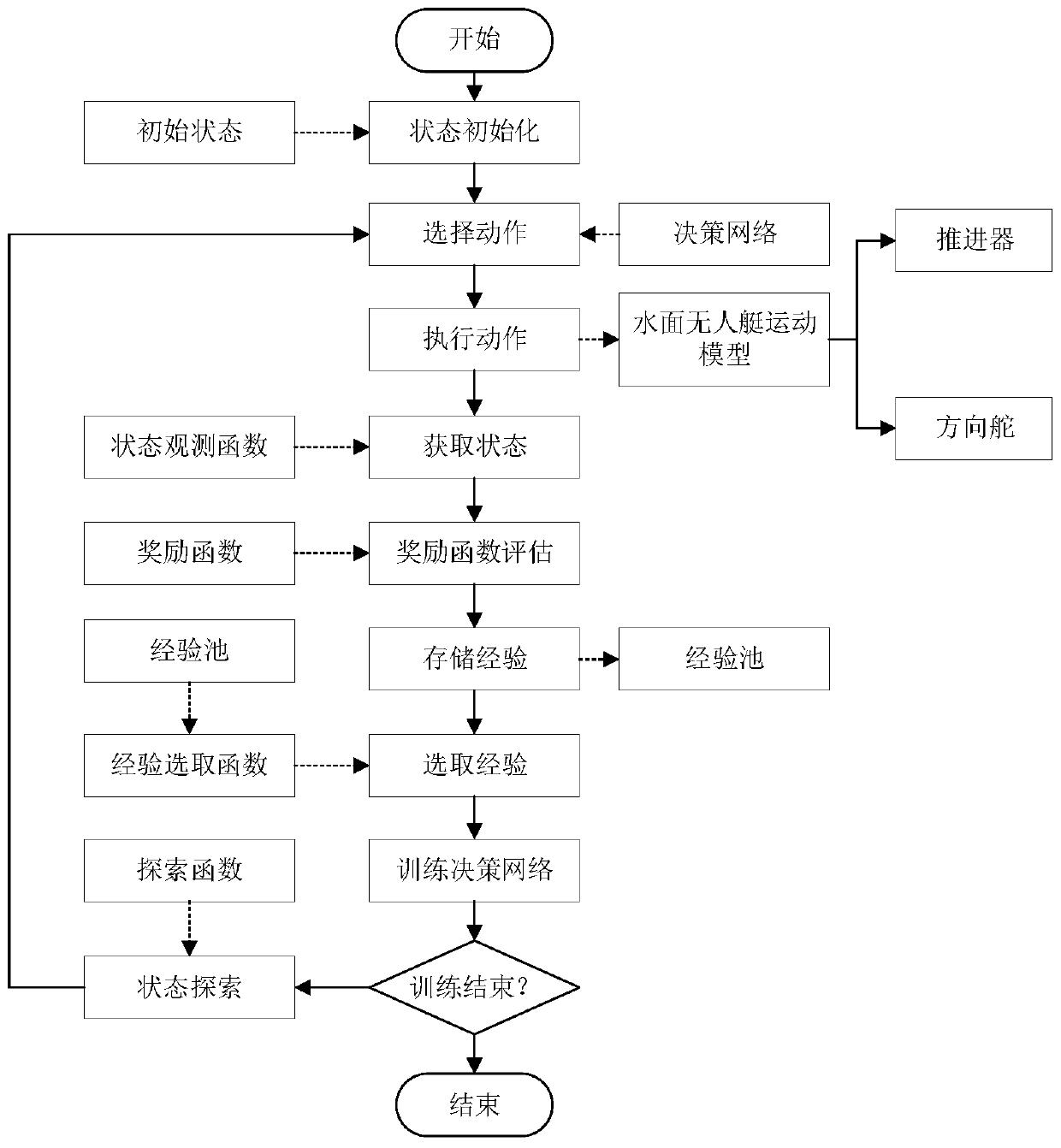
[0028] see Figure 1-2 , an embodiment of the present invention provides a technical solution: a method for designing a path tracking controller for an unmanned surface vehicle, which specifically includes the following steps:
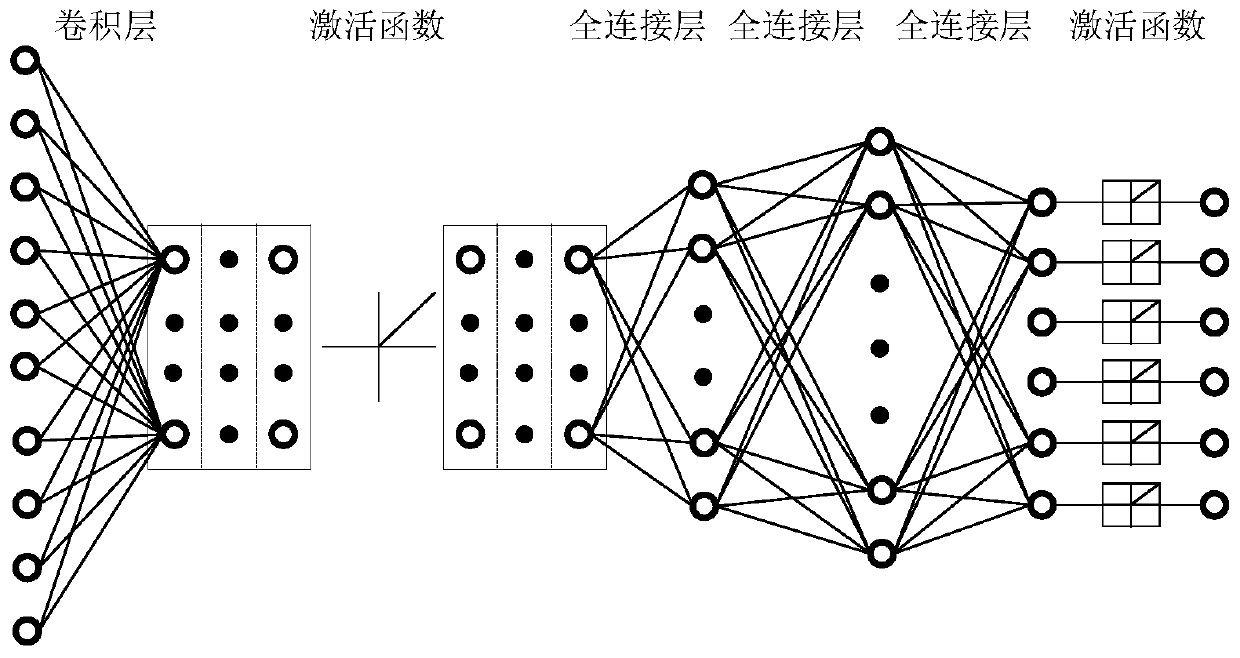
[0029] S1. According to the task requirements of surface unmanned vehicle path tracking, first design the decision-making network, which can be trained to enable the decision-making network to obtain decision-making ability, and then d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More