

Adaptive UKF algorithm navigation method and system thereof
A navigation method and inertial navigation system technology, applied in directions such as navigation calculation tools, radio wave measurement systems, satellite radio beacon positioning systems, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
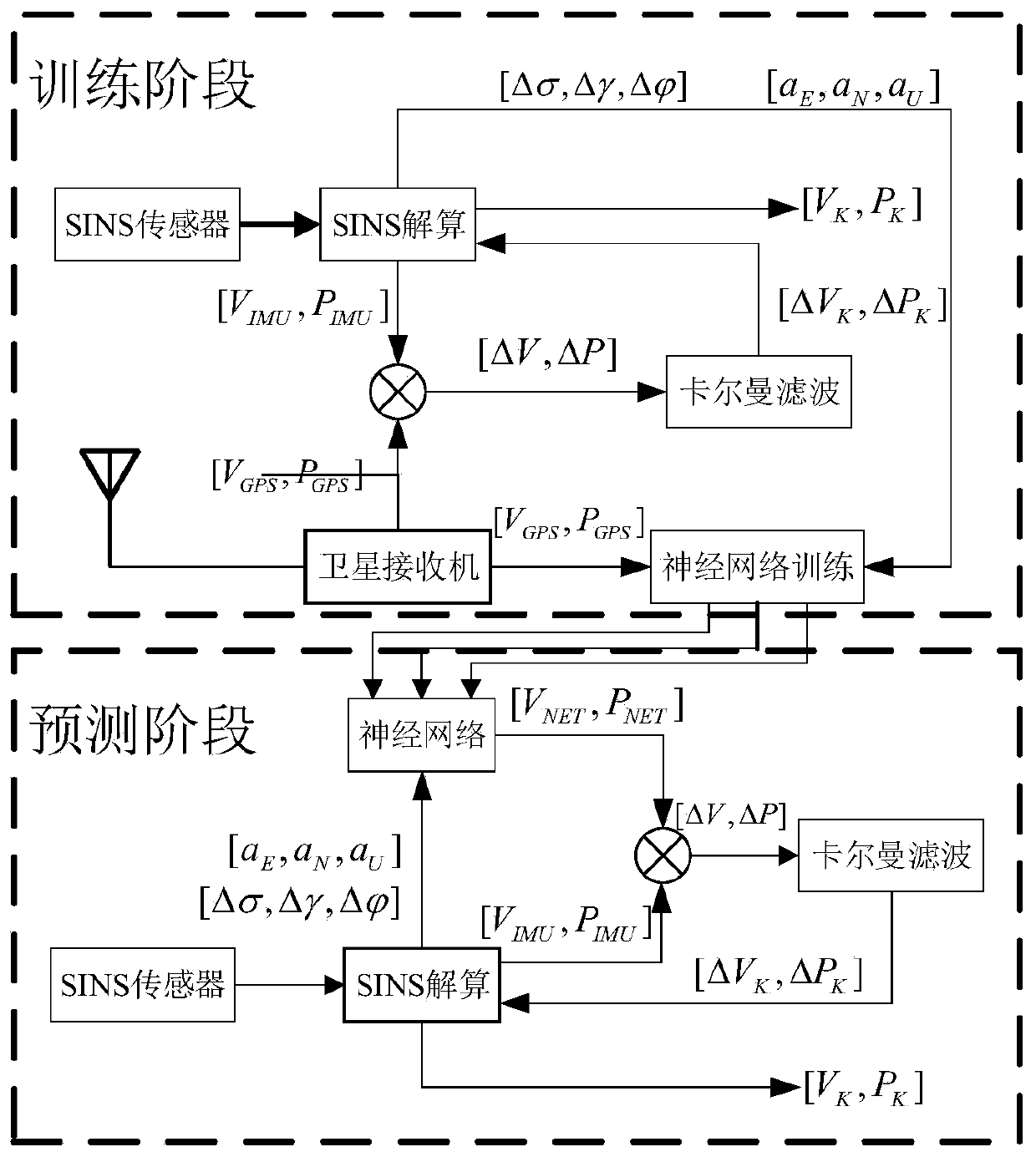
[0088] Such as Figure 3-4 As shown, the embodiment provides a navigation method of an adaptive UKF algorithm,
[0089] Step 1: Collect the raw data of the inertial sensor, including the three-axis acceleration value output by the accelerometer and the three-axis angular rate value output by the gyroscope;
[0090] Step 2: update the positioning information of the inertial navigation system, and calculate the eastward, northward, celestial velocity, pitch angle, and roll of the carrier in the northeast sky coordinate system according to the acceleration value and angular rate value output by the inertial measurement device and the initial value of the system state Angle, heading angle, and then calculate the longitude, latitude and height information;
[0091] Step 3: Search and collect GPS positioning information, including the current carrier latitude and longitude, altitude, and three-way speed in the northeast sky, and judge the reliability of the satellite signal accordi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More