

AUV path planning method in ocean current environment based on population super-heuristic algorithm
A heuristic algorithm and path planning technology, applied in the direction of height or depth control, can solve problems such as difficult tracking, high energy consumption for tracking, and rough paths
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
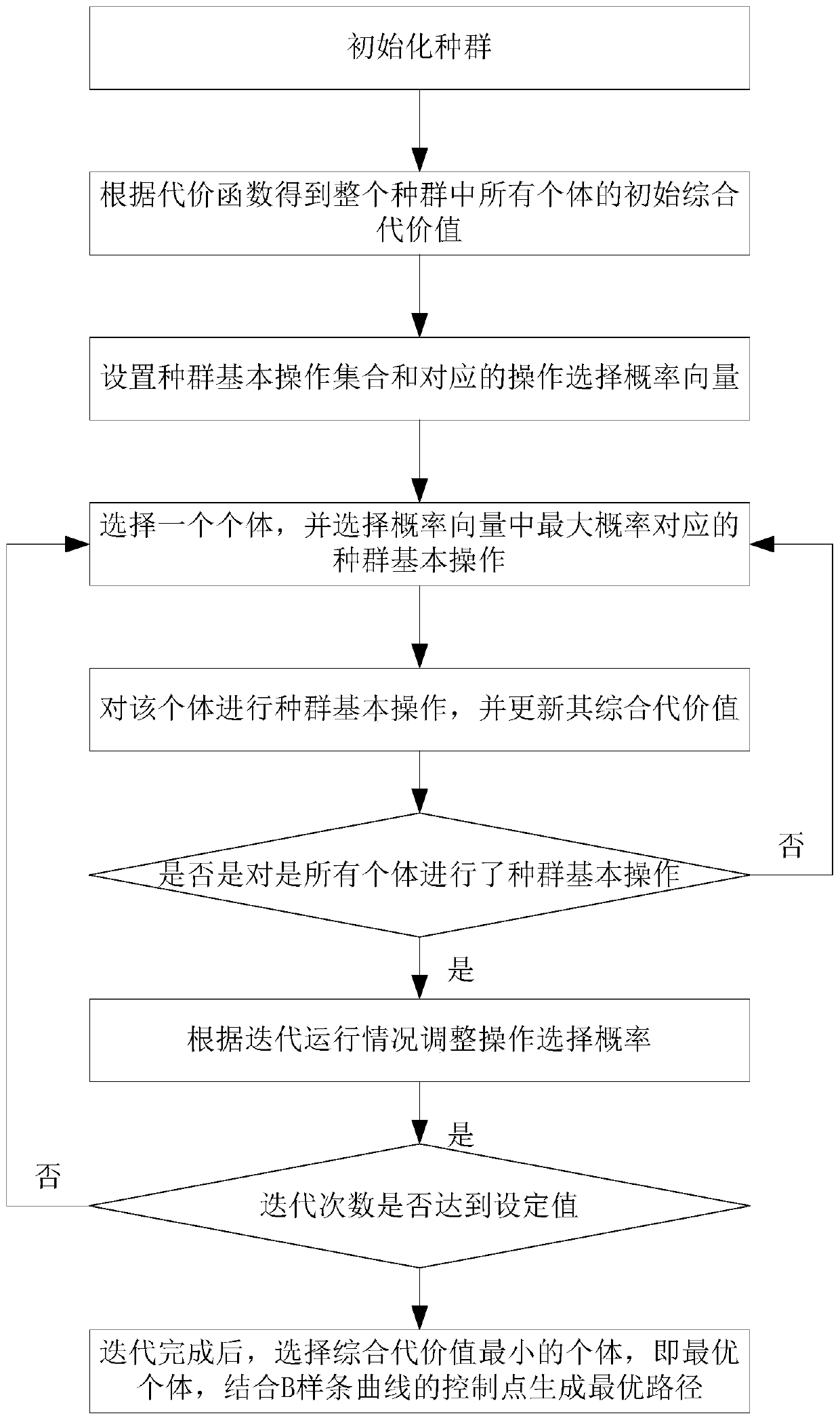
[0074]A preferred embodiment of the present invention provides an AUV path planning method based on a population super-heuristic algorithm in an ocean current environment, such as figure 1 shown, including the following steps:
[0075] Step 1: Initialize the population, and then obtain the initial comprehensive cost value of all individuals in the entire population according to the cost function that integrates time efficiency, environmental map, AUV body motion radius of curvature and ocean current information constraints;
[0076] Step 1.1: Set the starting point and ending point of the AUV path, connect the starting point and the ending point, and generate M equal points on the connection line, draw a vertical line according to the connecting line between the starting point and the end point on each equal point point, and obtain M vertical lines, and each vertical line generates i max random points, so that i max group of random points, the i-th group of random points is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More