

Steering system of small double-propeller unmanned surface vehicle
A rudder system and boat maneuvering technology, which can be used in steering steering with rudder, etc., can solve the problems of high price, impracticality, long product supply cycle, etc., and achieve the effect of improving safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
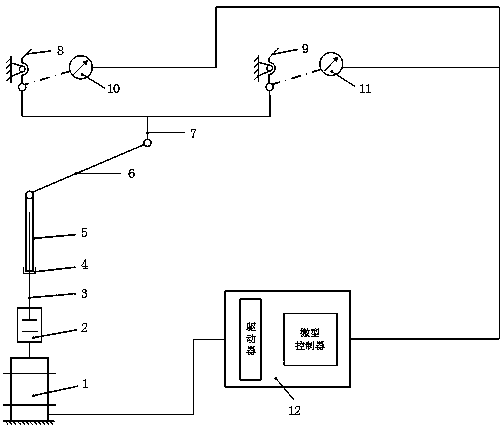
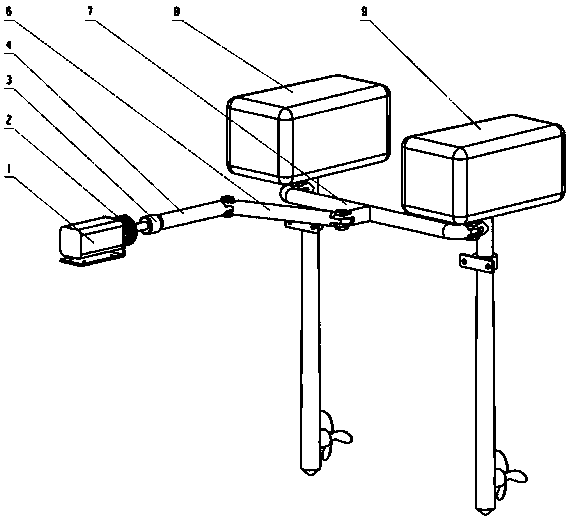
[0023] see figure 1 and figure 2 , This small double-push unmanned boat steering system includes: a stepping motor (1), a coupling (2), a screw (3), a shaft end cover (4), and a screw sleeve (5) , one intermediate link (6), one parallel link (7), two propeller thrusters - left rudder (8), right rudder (9), two angle sensors - rudder angle indicator 1 (10), rudder Angle indicator 2 (11), a bottom control box (12) housing the motor driver and microprocessor. Its characteristic is that the control of the system can be controlled by a fully closed-loop control method. First, the installation of the mechanical components of the system and the rudder angle indicator is completed, and then the bottom control box is installed to complete the wiring from the bottom box to the motor and to the rudder angle indicator. the electrical wiring of the device. Afterwards, the values of the two rudder angle sensors can be read back by using the microprocessor, and the installation positio...
Embodiment 2
[0025] This embodiment is relatively a simplified control version of the first embodiment, without the two rudder angle sensors (10) and (11) in the first embodiment, but uses the closed-loop characteristics of the motor itself to form the semi-closed-loop control of the double-push steering system. Similarly, after assembling the mechanical components of the system and completing the electrical wiring, it is necessary to manually control the motor to rotate to the left full rudder and right full rudder positions in advance, and calibrate the origin of the stepper motor and read the full rudder position. Position information returned by the motor encoder. Take the read position value as the upper limit and lower limit of the motor control value, and do software limit protection in the program. The semi-closed-loop control idea is as follows, the command to seek the position of the motor is sent regularly, the current position of the motor is read out, and then the angle value ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More