

System, method and device for measuring tilt amount of GNSS receiver and storage medium
A tilt measurement and receiver technology, applied in the field of navigation and positioning, can solve the problems of complex correction process, position information error, cumbersome correction, etc., and achieve the effect of improving the acquisition accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
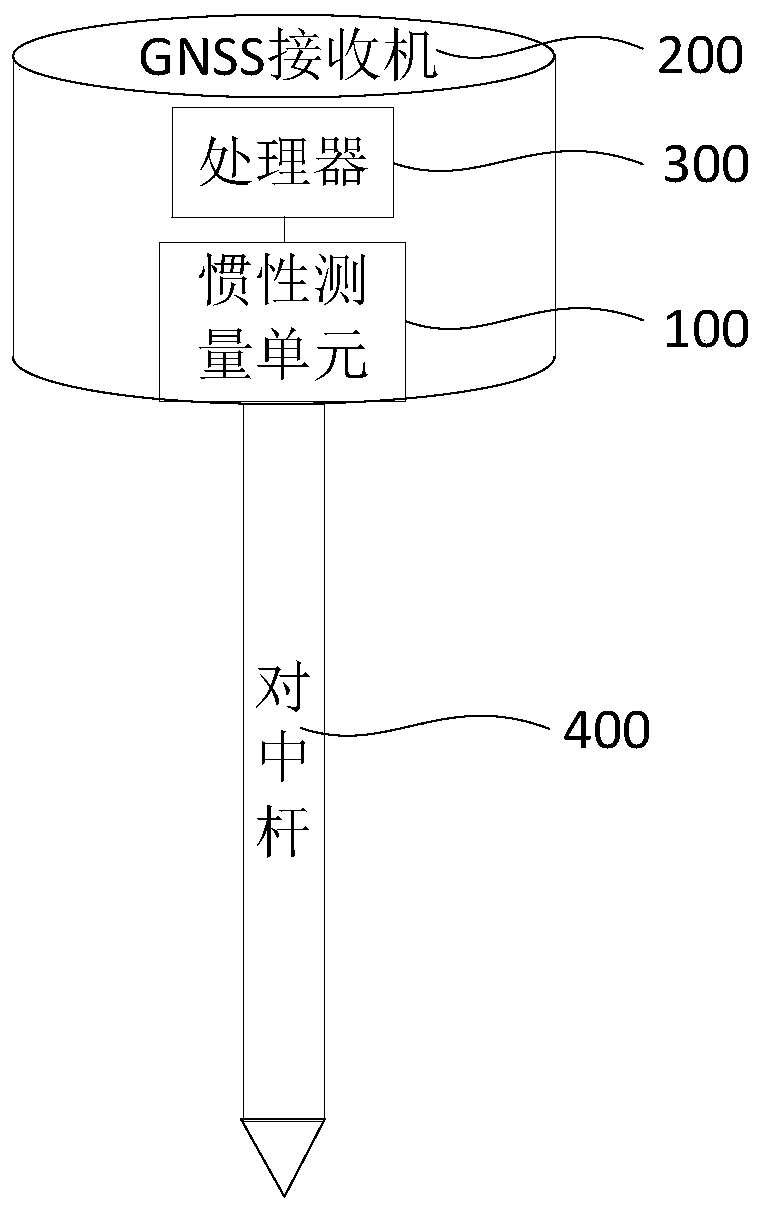
[0030] figure 1 A structural block diagram of a GNSS receiver tilt measurement system provided in Embodiment 1 of the present invention, the system includes: an inertial measurement unit 100, a GNSS receiver 200, a processor 300, and a centering rod 400, and the centering rod 400 is connected to The bottom of the GNSS receiver 200 is centered and directed to the ground.
[0031] The GNSS receiver 200 is configured to measure first position information of the antenna phase center of the GNSS receiver 200 and send it to the processor 400; the first position information includes first position coordinates and a first speed.
[0032] GNSS, which uses satellites to achieve multiple functions such as positioning, navigation, and monitoring. All existing satellite navigation systems, such as GPS and Beidou, belong to the category of GNSS; and GNSS receivers use GNSS technology to use To carry out long-term online monitoring of the displacement of the surface. When a small displaceme...
Embodiment 2
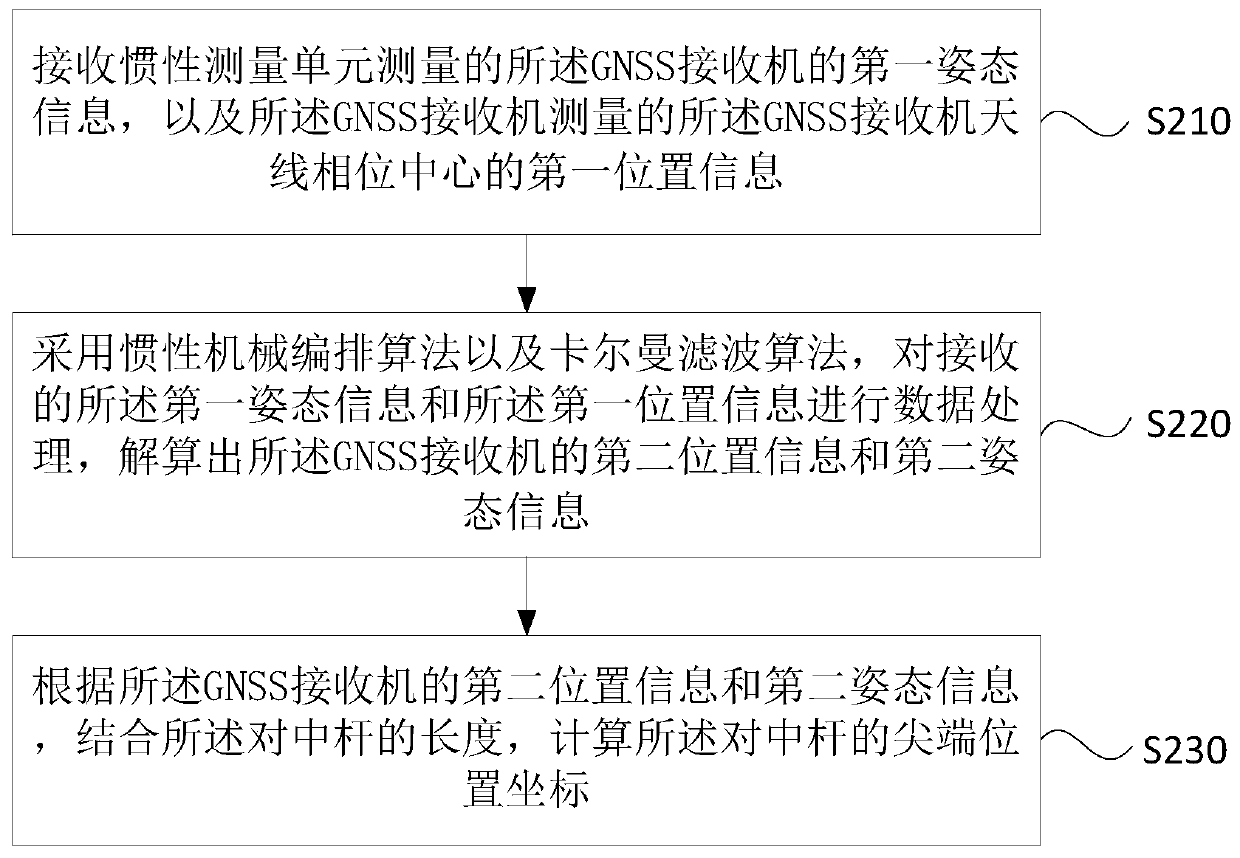
[0043] figure 2 A flow chart of a method for measuring the inclination of a GNSS receiver provided in Embodiment 2 of the present invention. This embodiment is applicable to the situation where an inertial measurement unit and a GNSS receiver are used to perform inclination measurement together. This method can be implemented by the GNSS receiver inclination measuring device is implemented, and this device can be realized by software and / or hardware, and generally can be integrated in the GNSS receiver inclination system as described in any embodiment of the present invention, typically, can be with program code The mode is integrated in the processor of the GNSS receiver tilting system, and the method in the embodiment of the present invention specifically includes the following steps:
[0044] S210. Receive first attitude information of the GNSS receiver measured by an inertial measurement unit, and first position information of an antenna phase center of the GNSS receiver ...
Embodiment 3
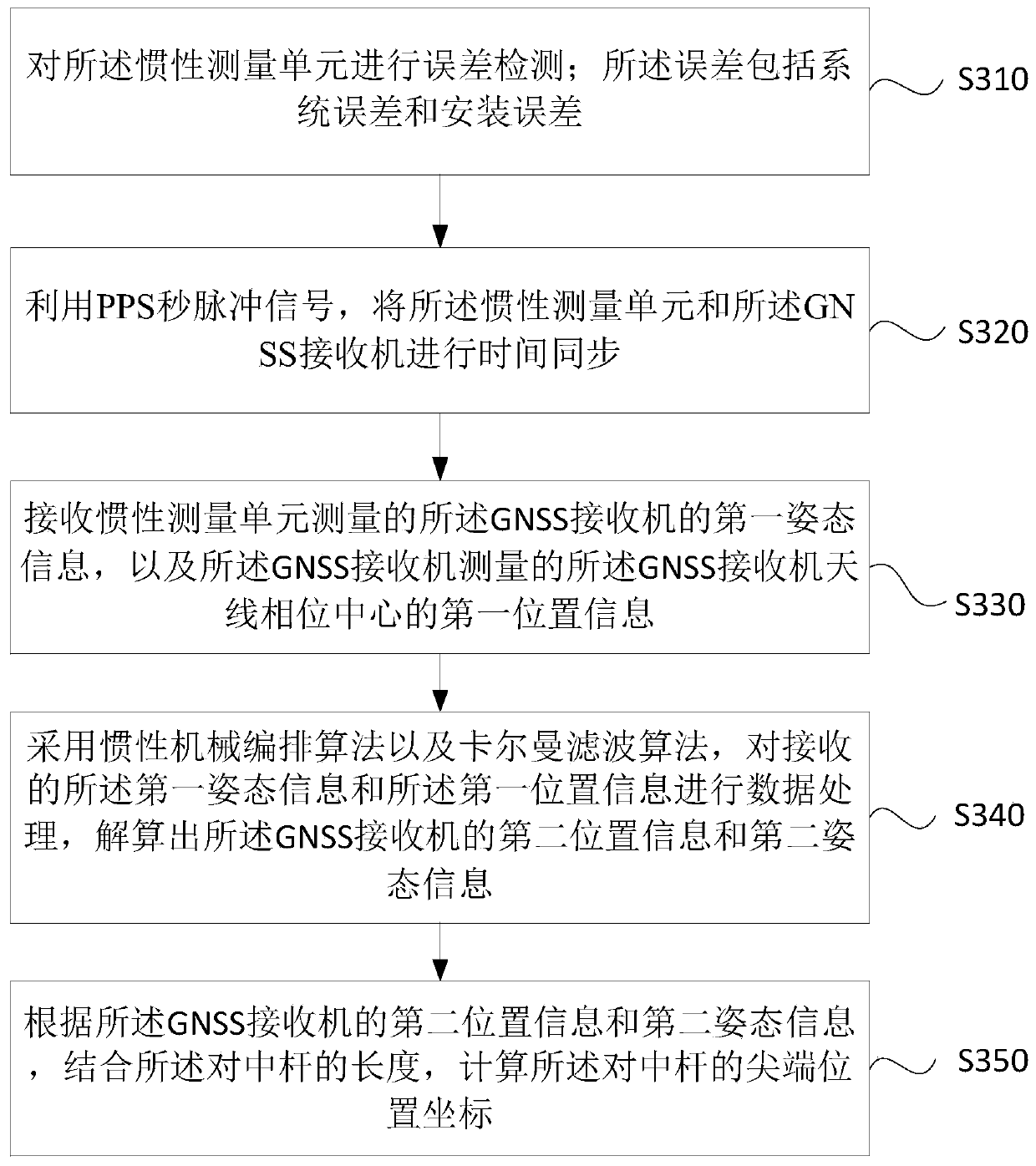
[0053] Figure 3A A flow chart of a GNSS receiver tilt measurement method provided by Embodiment 3 of the present invention. This embodiment is embodied on the basis of the above-mentioned embodiments. In this embodiment, the inertial measurement unit is installed on the GNSS receiver to perform Error detection, while the inertial measurement unit and the GNSS receiver are time-synchronized, the method of the embodiment of the invention specifically includes the following steps:
[0054] S310. Perform error detection on the inertial measurement unit; the error includes a system error and an installation error.
[0055] When the inertial measurement unit is installed in the GNSS receiver, due to various factors such as manual installation and structure, there must be installation errors; at the same time, the inertial measurement unit itself has a system error, which includes the zero bias of the gyroscope, It can also include the zero bias of the accelerometer and the scale f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More