Positioning method based on three-dimensional laser grid and robot autonomous charging method
A three-dimensional laser, positioning method technology, applied in the field of intelligent robots, can solve the problems of power supply contact docking failure, fitting straight line deviation, affecting the straight line fitting accuracy, etc., to increase robustness and stability, improve positioning accuracy, positioning The effect of improved accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
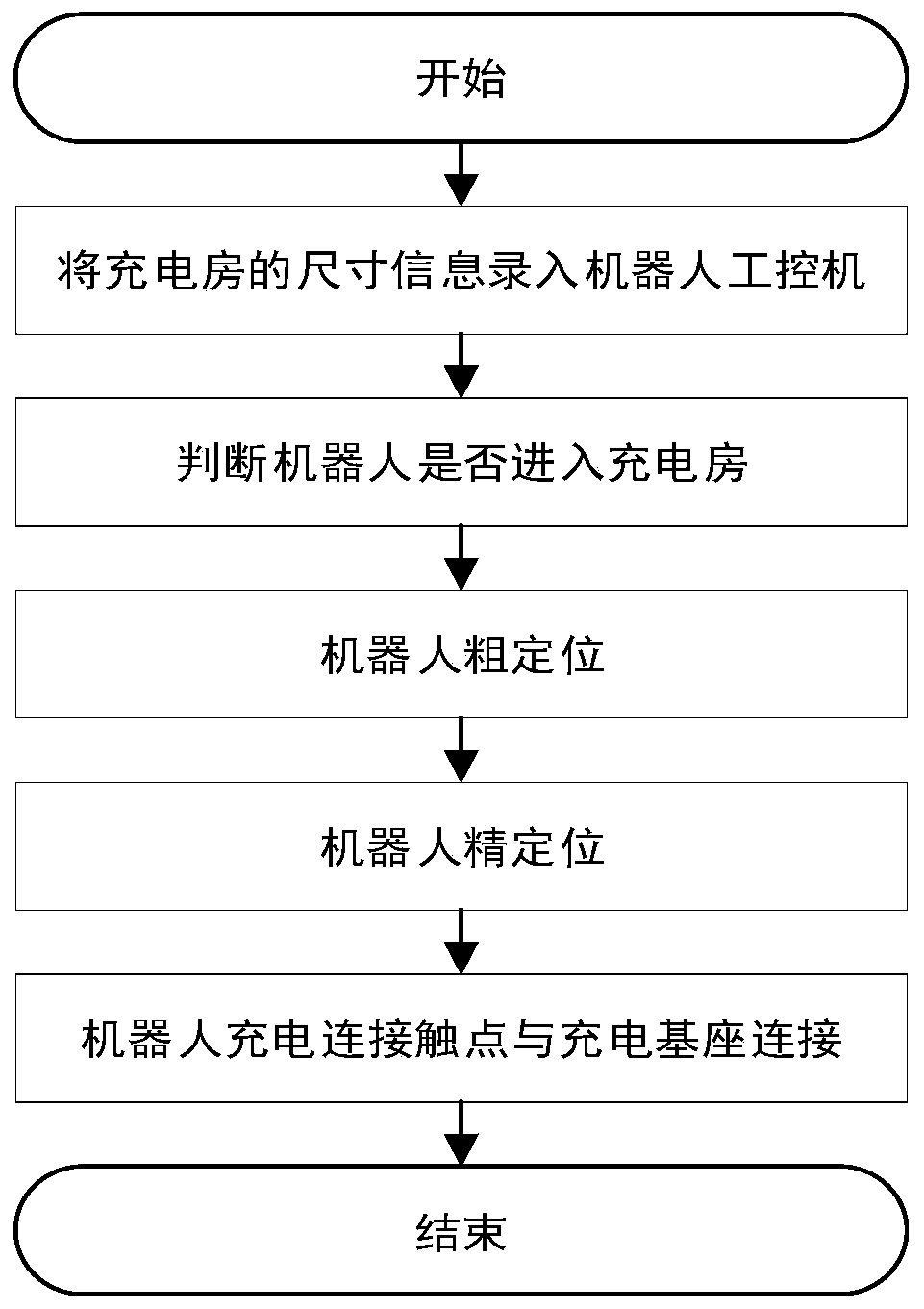
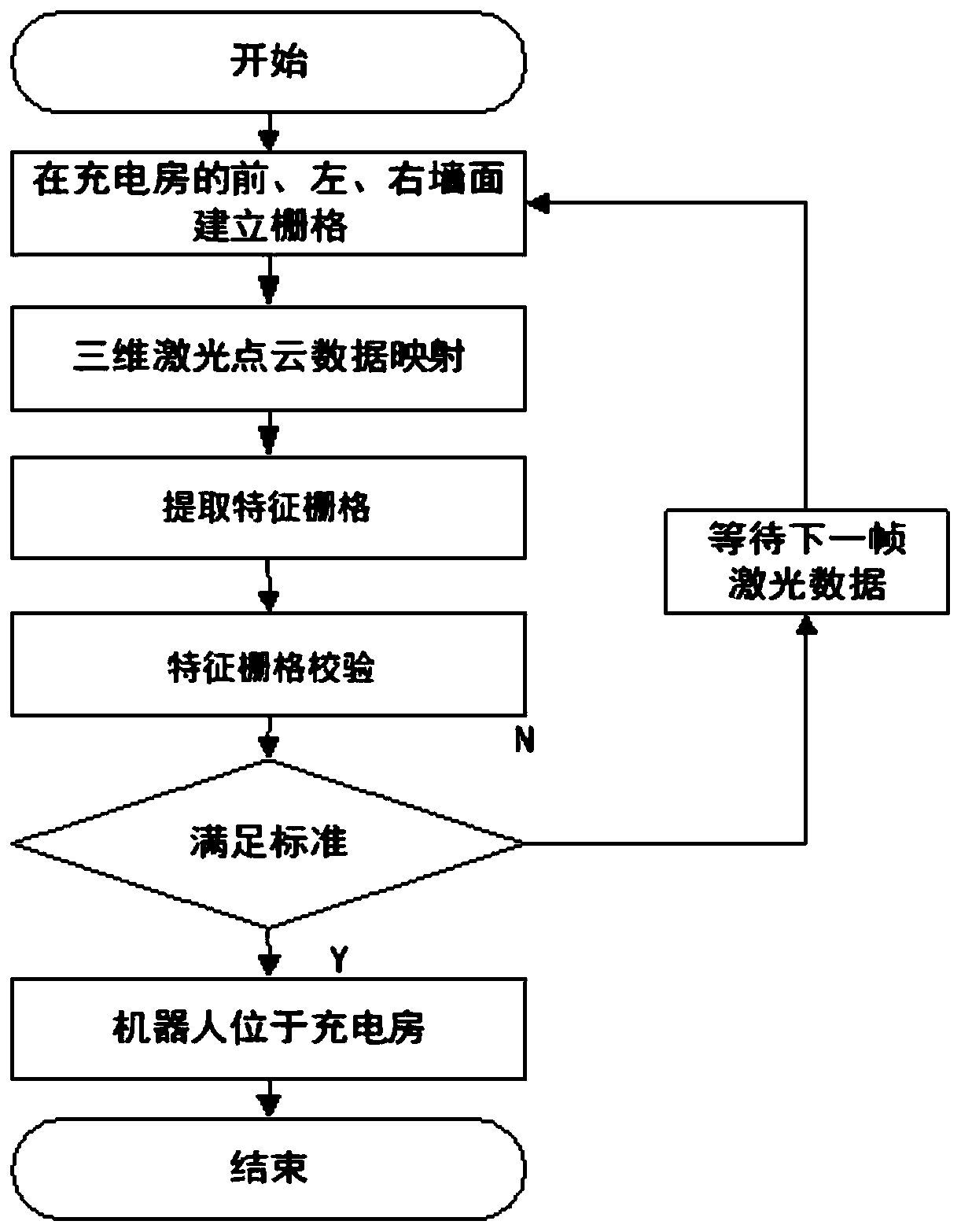
[0077] An embodiment of the present invention introduces an autonomous charging method for a substation inspection robot based on three-dimensional laser grid positioning.
[0078] Definitions of technical terms relevant to this embodiment are as follows:
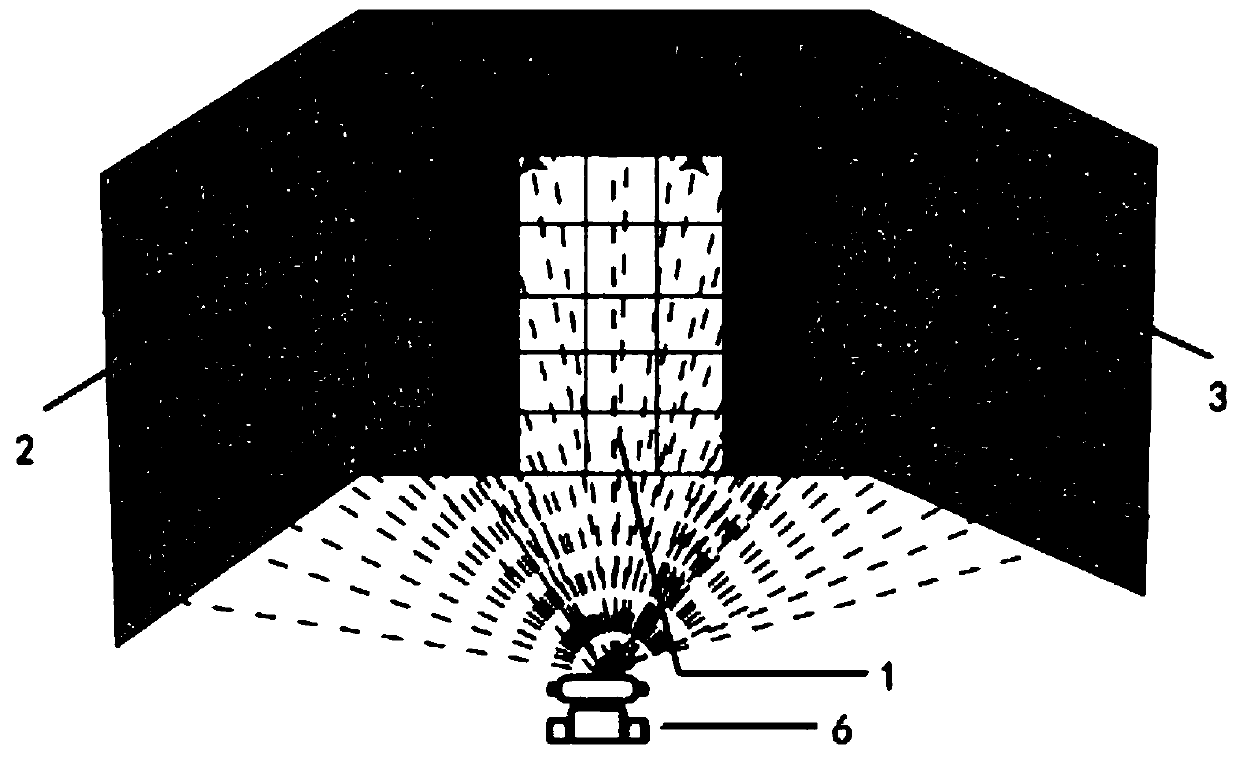
[0079] Grid: An array of grids of uniform size and close proximity.
[0080] Laser grid: A grid with laser irradiation.
[0081] Gray raster: Laser raster that satisfies confidence requirements.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com