

Method for optimizing robot grabbing sequence
A sequence optimization and robot technology, applied in the field of robotics, can solve problems such as missed grasping by robots, achieve the effect of reducing the rate of missed grasping and improving grasping efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
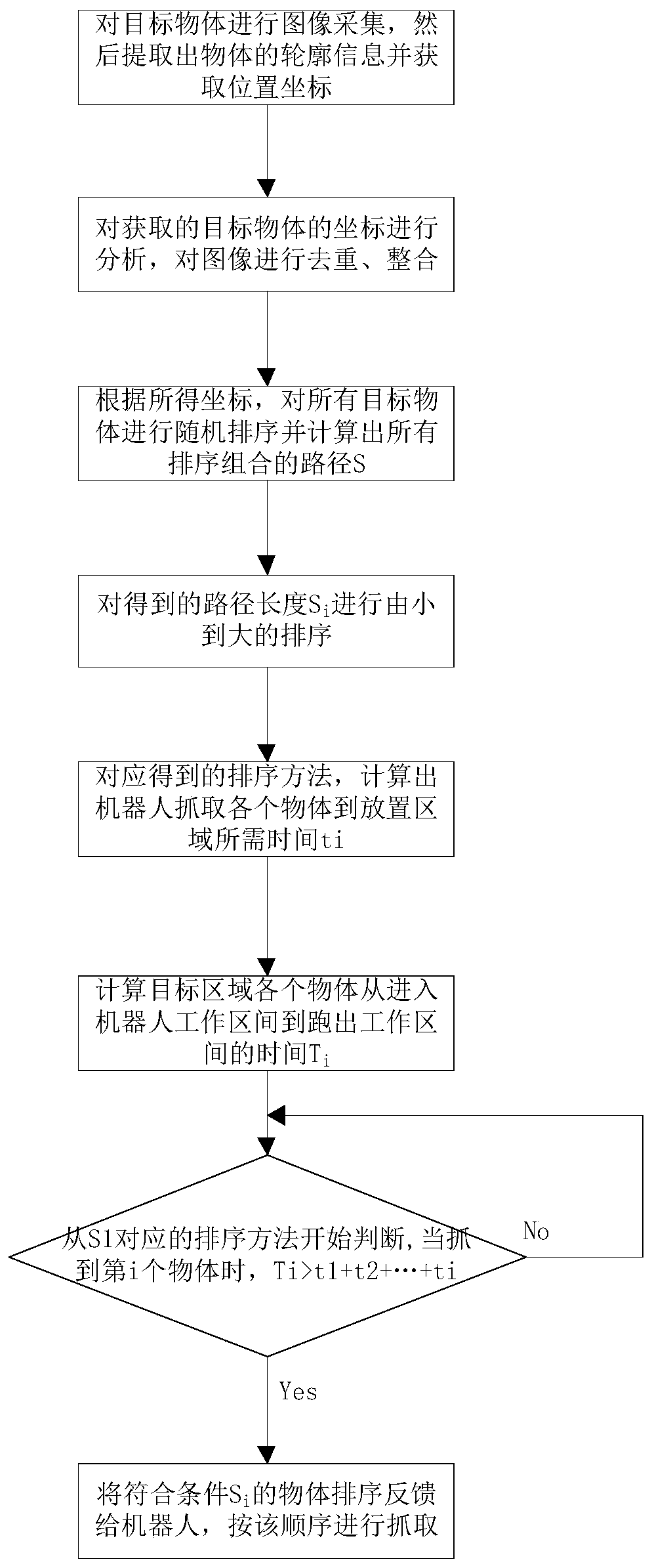
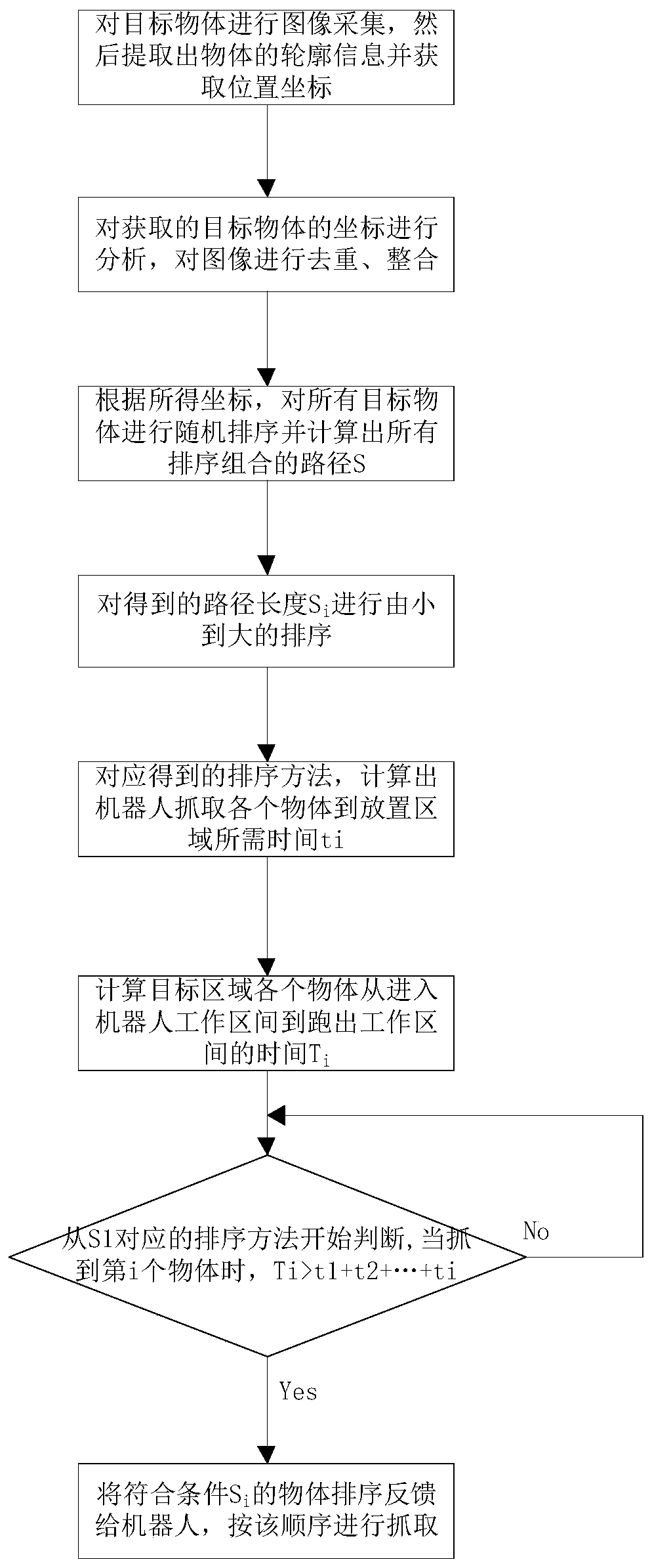
[0029] Such as figure 1 As shown, a method for robot grasping order optimization, the method includes the following steps:
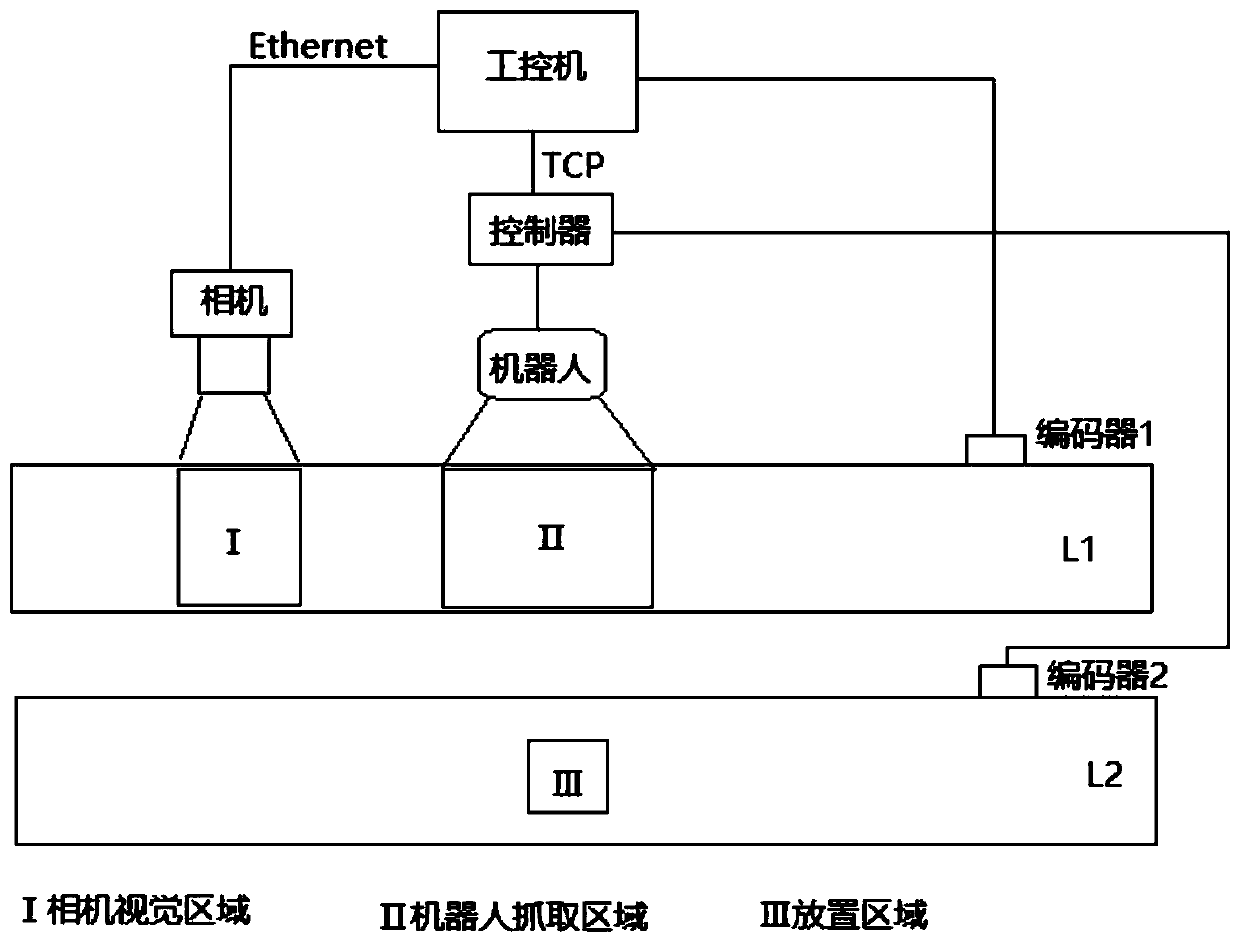
[0030] S1: if figure 2 As shown, it is the working platform for the robot to grab the target object, and the camera shooting interval of the robot's vision system is set. In this embodiment, a fixed time interval of 3000-5000 ms is used as the shooting interval, and the image of the target object is collected by the camera and uploaded to the industrial control system. computer, the industrial computer performs image processing on the image of the target object, extracts the contour information of the target object and obtains the position coordinates; then sends the coordinate information of the target object to the controller, and the controller controls the encoder according to the coordinate information of the target object and the industrial computer The feedback information is used to plan the motion trajectory of the manipulator and calculate th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More