

Unmanned aerial vehicle (UAV) flight path planning method based on competitive deep learning network
A deep learning network and flight path technology, applied in the field of UAV flight path planning, can solve problems such as reducing the accuracy of UAV planning paths, and the safety and efficiency of UAV path planning being difficult to meet requirements.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
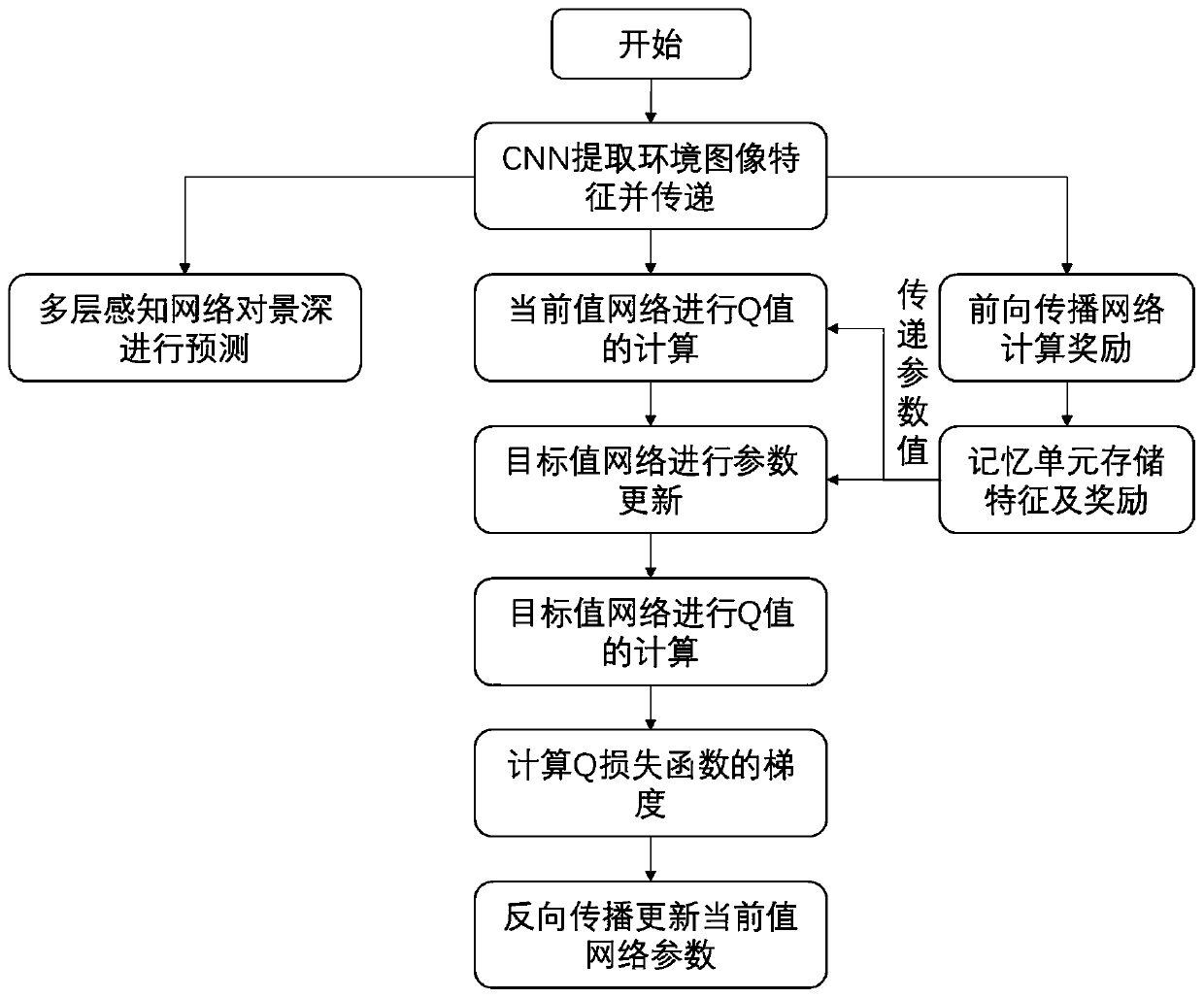
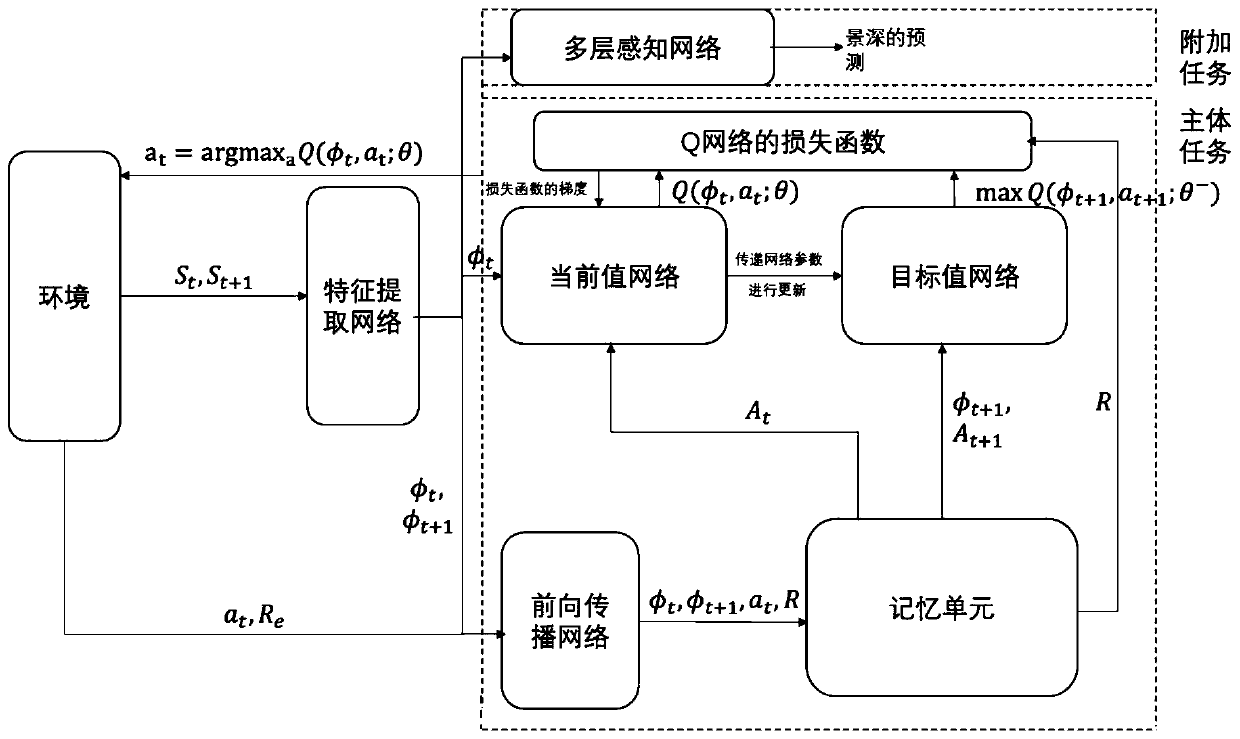
[0052] Such as figure 1 , 3 Shown, the present invention is concretely realized as follows:
[0053] In the first step, the camera on the UAV takes real-time shots of the environment and obtains images. It is stipulated that the camera captures the image in front of the drone. By shooting, the environment transfers image information to the feature extraction network.
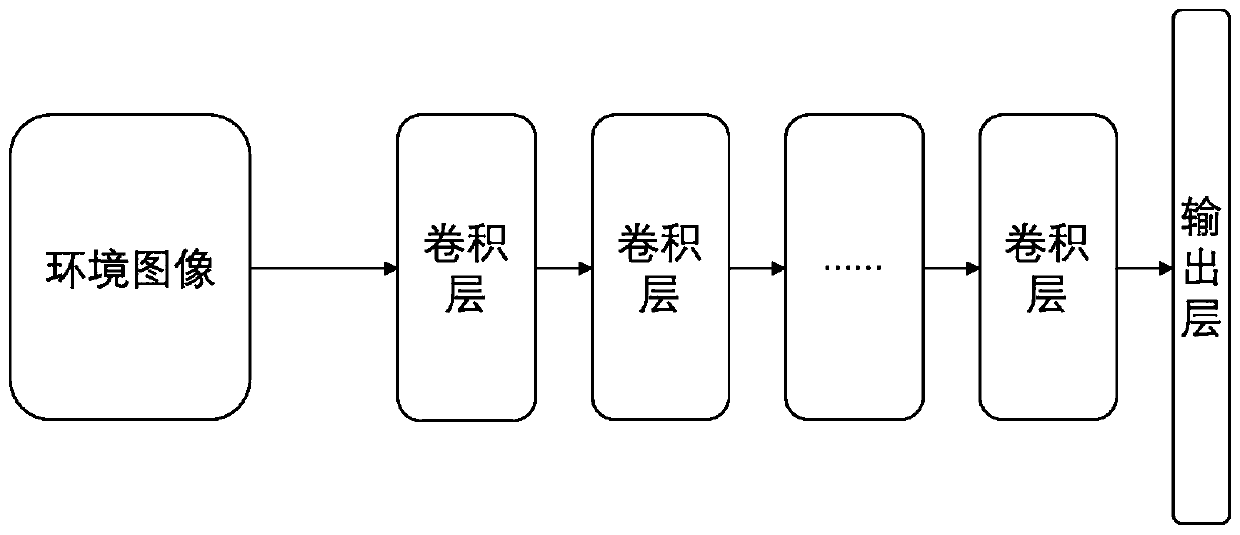
[0054] In the second step, the feature extraction network in the drone extracts feature information from the image. In the part of image processing, the main task is to complete the identification of visual positions, so in this part of the network, the present invention uses convolutional layers instead of pooling layers. Considering that the pooling layer performs element screening in some areas of the convolutional feature map, it is very likely to cause the loss of important p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More