Step-type attached walking wall crack detecting robot
A robot and robot body technology, applied in the direction of optical testing flaws/defects, etc., can solve the problems of easy falling off, high wall requirements, increasing the weight of the robot, etc., to achieve the effect of not easy to fall off, reliable performance, and smooth movement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
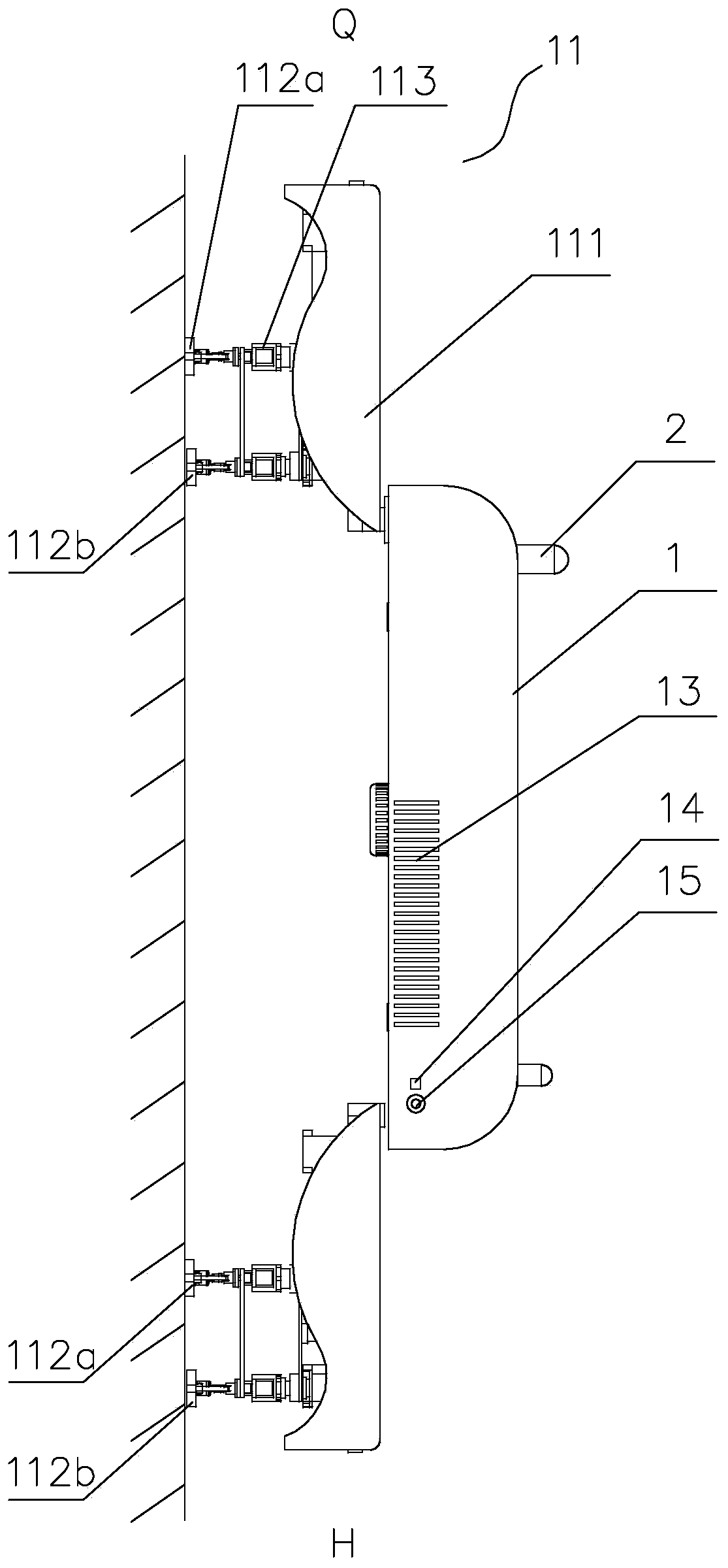
[0065] A walk-attached walking wall crack detection robot, comprising a robot body 1, a sensing and communication system 2 respectively installed on the robot body 1, a control system 3, and a visual detection system 4 for wall cracks, wherein:
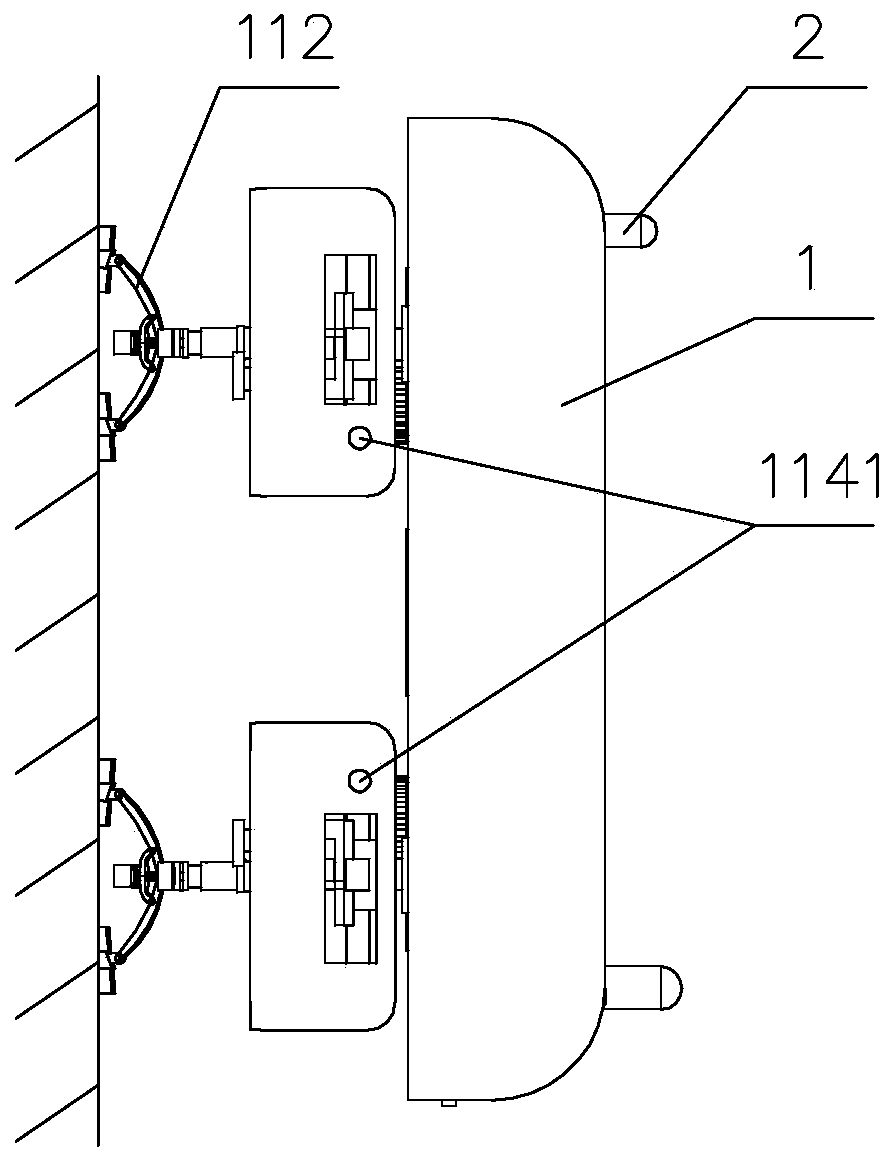
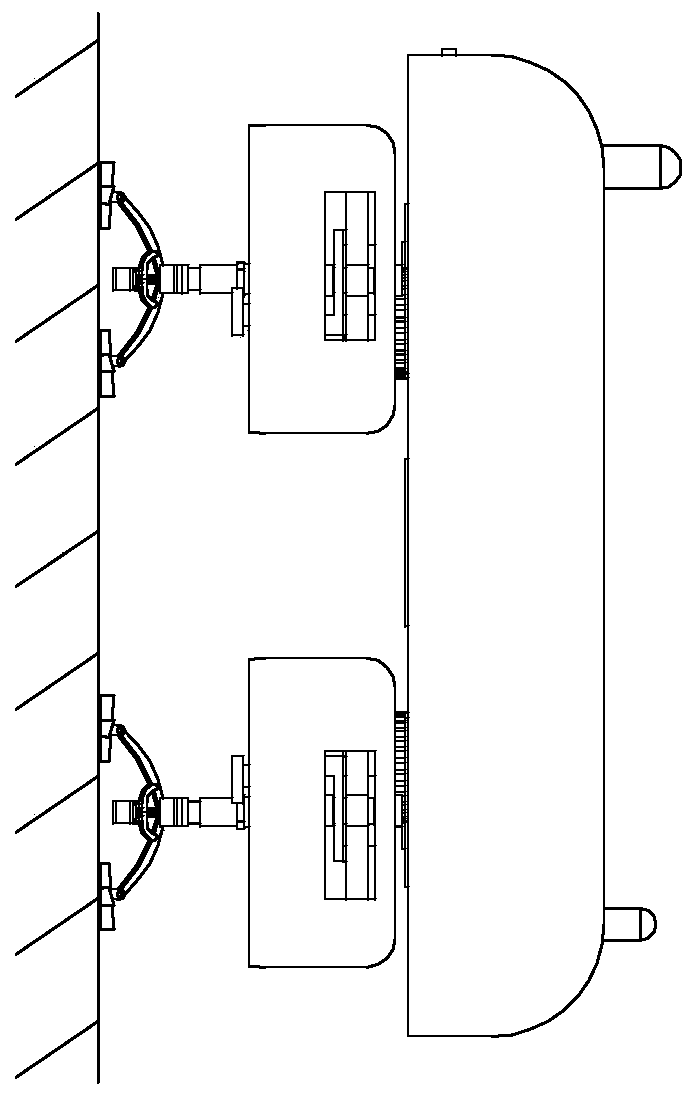
[0066] The front and rear of the robot body 1 are all provided with crawling legs 11 that open outwards; The bottom of the robot body 1 is connected, the top of the driving device 113 is connected with the upper cover 111, the bottom of the driving device 113 is connected with the walking device attached to the step-type wall surface, and the guide device 114 is installed on the upper cover 111; The input end of the traveling device is connected to the output end of the driving device 113 , and the driving device 113 and the guiding device 114 are respectively connected to the input and output ends of the control system 3 .
[0067] The walking device attached to the wall is based on a leaf spring reverse locking attachment device, in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com