

Teaching regenerated trajectory optimizing method based on GA-PSO
A trajectory optimization and teaching technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of difficult to obtain teaching trajectory, high skill requirements, high programming requirements, etc., to improve service life and mechanical performance, high tracking Accuracy, increased safety effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
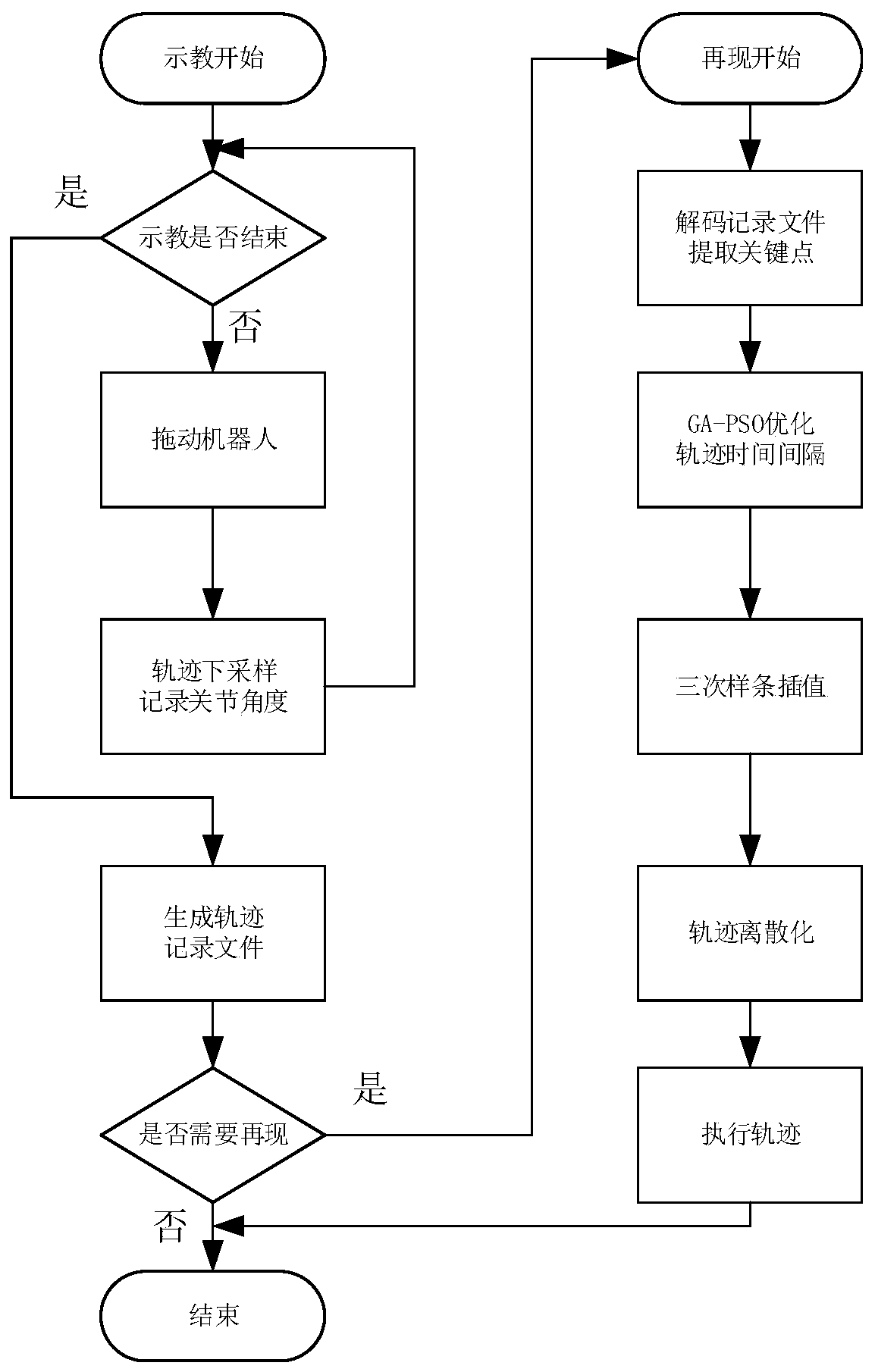
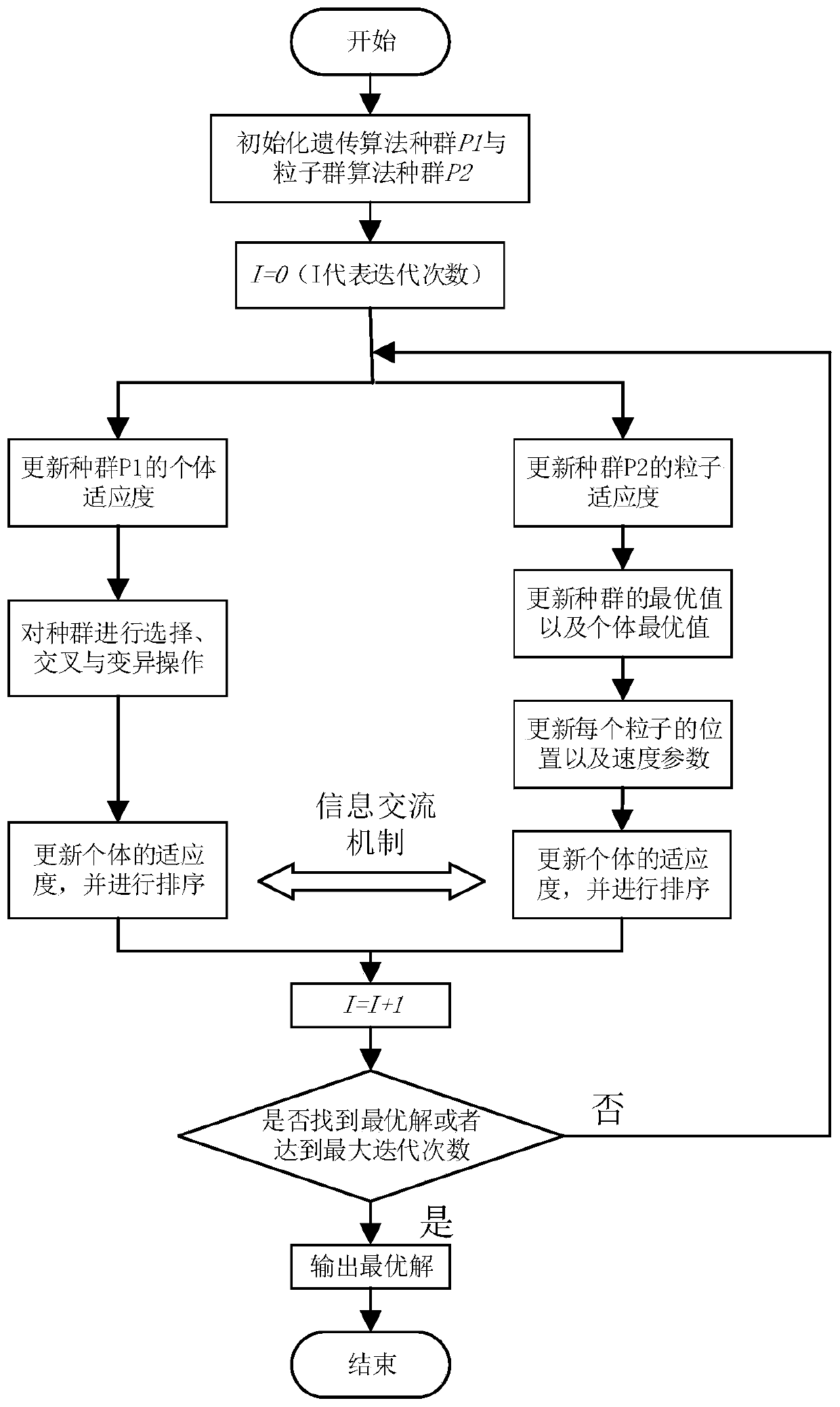
[0056] Such as figure 1 As shown, the present invention proposes a teaching and reproduction trajectory optimization method based on the GA-PSO algorithm, which optimizes the time interval between trajectory points, so that the teaching trajectory can not only meet the kinematic constraints of the robot, but also achieve the optimal time. Excellent, reducing the requirements for operators, making direct teaching simple and easy.
[0057] The present invention down-samples the teaching track, optimizes the time interval between track points by using the GA-PSO optimization algorithm, and interpolates the track points by using cubic spline curves, so as to obtain the best time and meet the constraints of angular velocity and angular acceleration Teach track.
[0058] Specifically include the following steps:
[0059] 1) Teaching track sampling: When the operator drags the end of the robot to teach, according to the set sampling period, the angle values of each joint of the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More