

Multi-variable amphibious quadrotor robot
A robot and quadrotor technology, applied in the field of robotics, can solve the problems of inability to successfully complete the specified task, limited vision, difficulty in movement, etc., and achieve the effect of strong ability to adapt to the environment, reliable positioning information, and rich environmental information.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
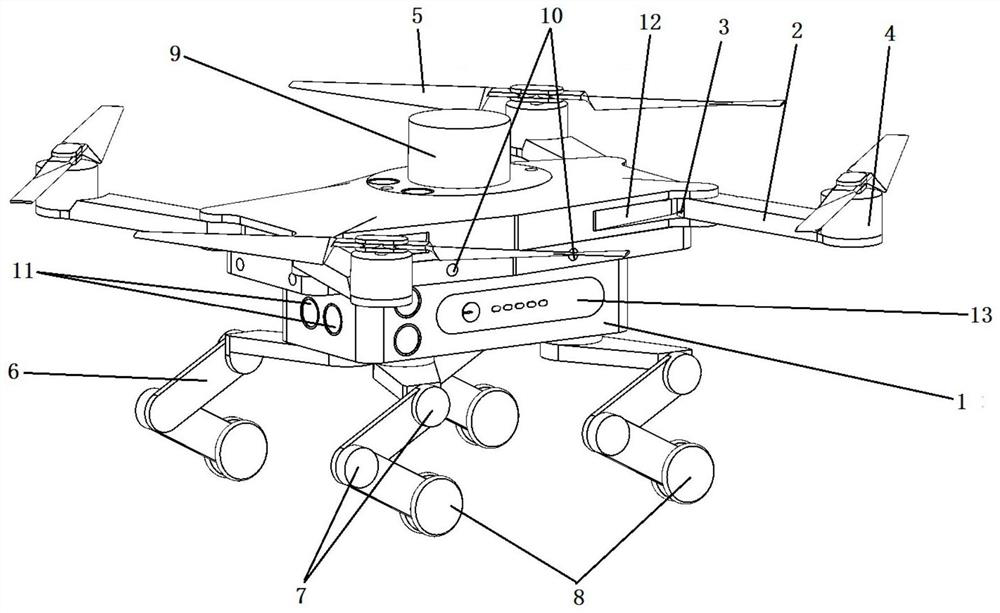
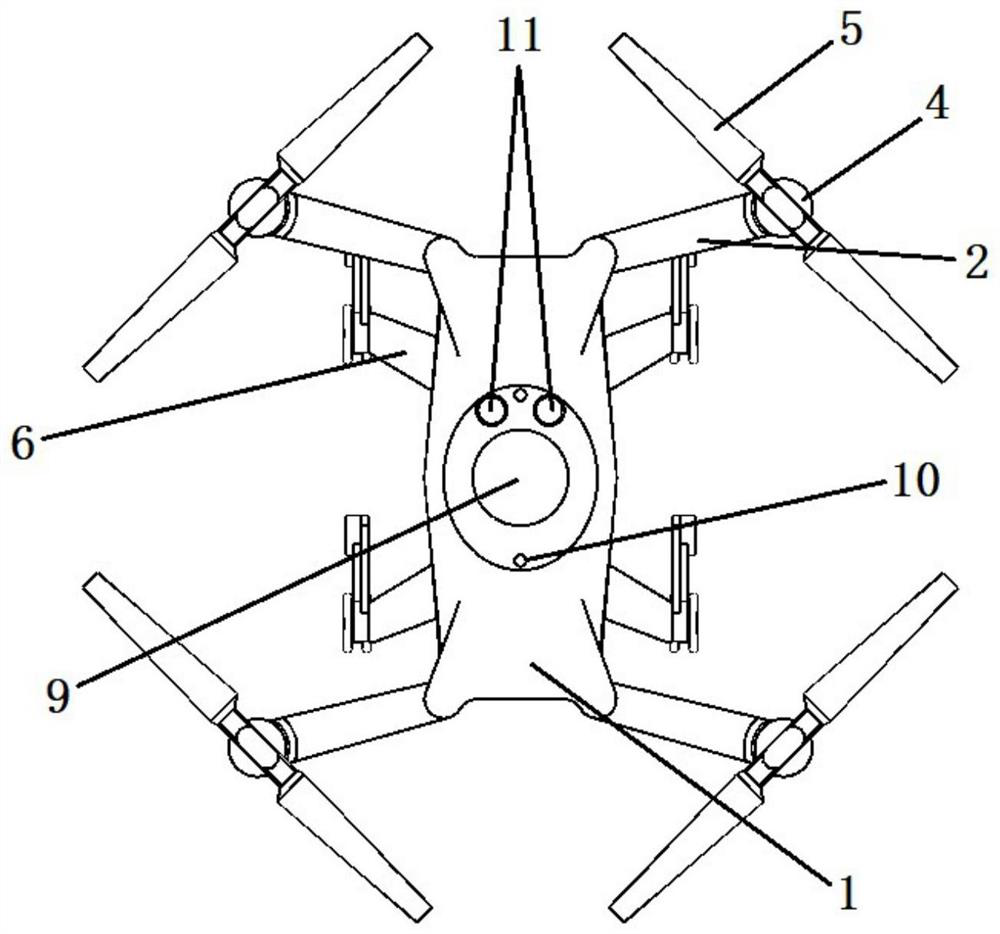
[0054] like Figure 5 As shown, the robot is in a common flight mode, and the four sets of caster wheel structures are recovered to the body 1, so that the robot is subjected to as little resistance as possible during flight; the four arms 2 are unfolded to appropriate positions, so that the four brushless motors 4 bottom The center is exactly on the vertices of a square. Start brushless motor 4 now, can realize the common flight pattern of robot quadrotor.
Embodiment 2
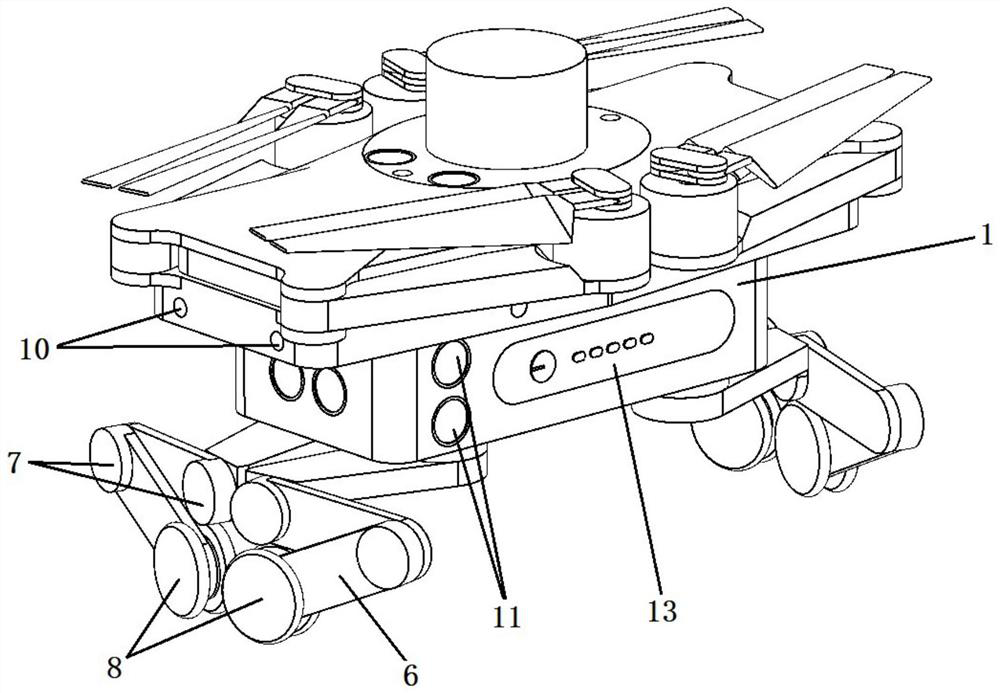
[0056] like Figure 6 As shown, the robot is in a common ground translation mode. When the robot walks on a flat ground without granular obstacles, the robot retracts the arm 2 so that it takes up less space and can pass through smaller passages; the four groups The caster structure is slightly curved to lower the center of gravity; at this time, the land servo motor 7 driving the roller 8 enables the robot to translate smoothly on the ground. In addition, the steering function is achieved by controlling the land servo motor 7 connecting the foot 6 to the body 1 to rotate at a certain angle or controlling the rotation direction of the four rollers 8 .
Embodiment 3
[0058] The robot moves quickly on flat ground, such as Figure 7 As shown, when the robot needs to quickly pass through the low-altitude flat ground that is inconvenient to take off, the robot can bend the front two sets of caster structures and straighten the rear two sets of caster structures, so that the body 1 leans forward; or as Figure 8 As shown, the front and rear caster structures are all straightened, while the front two sets of caster structures are stretched forward, so that the body 1 is tilted forward. Then each machine arm 2 is launched, and the brushless motor 4 on the machine arm 2 and the land travel servo motor 7 of each roller 8 are started simultaneously, so that the robot can be passed through the flat ground quickly. At this time, the lift force generated by the propeller 5 can also adjust the attitude of the robot to prevent it from tipping over and overturning. In addition, the steering method described in Embodiment 2 can also be used to realize stee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More