

SLAM-based robot navigation method and robot
A navigation method and robot technology, applied in a SLAM-based robot navigation method and a robot field, can solve problems such as large amount of data, inaccurate odometer data and inertial navigation data, affecting robot work efficiency and user experience, etc. Accuracy, ensuring the effect of stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solution provided by the present invention will be described in more detail below by means of the accompanying drawings and specific embodiments:
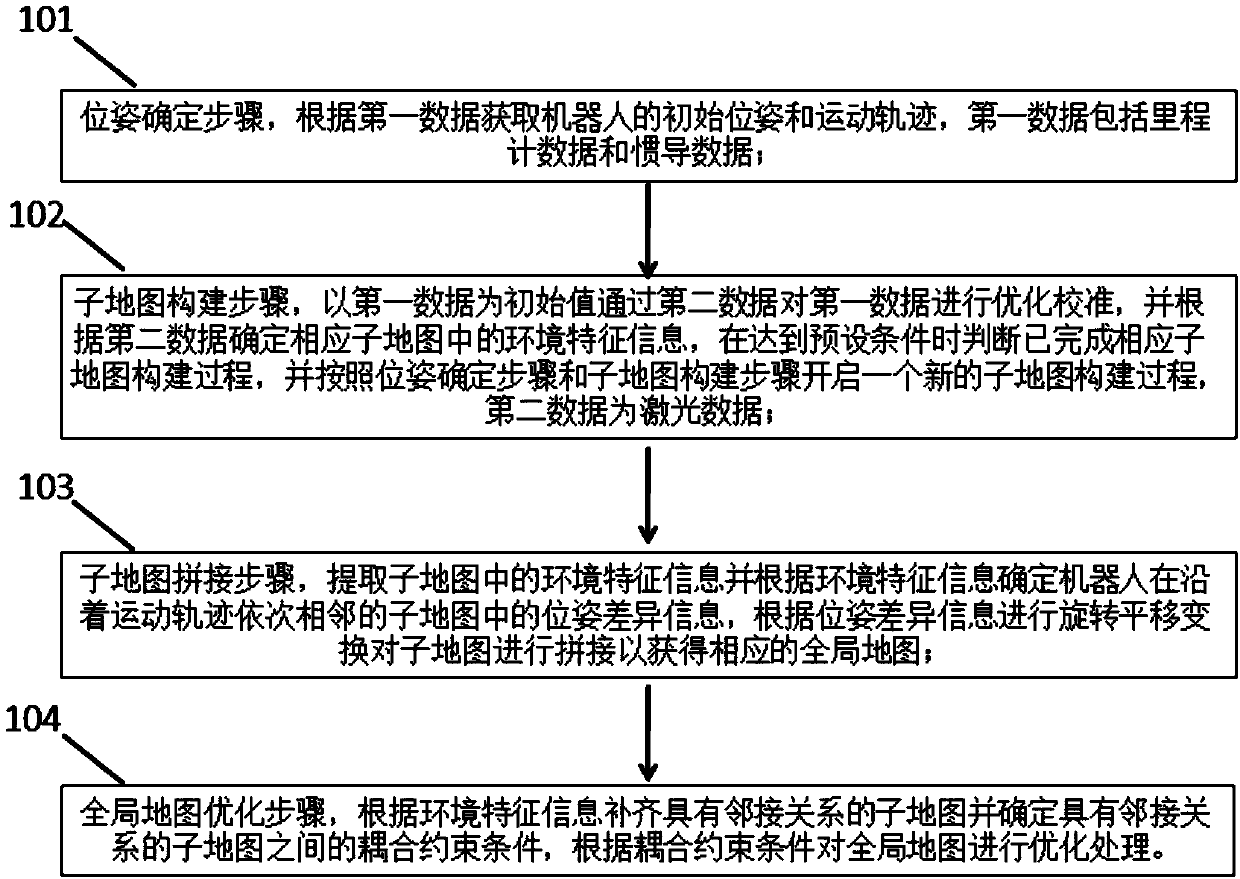
[0038] Such as figure 1 Shown is a block diagram of the steps of one embodiment of the present invention. This embodiment discloses a SLAM-based robot navigation method, including:
[0039] Step 101, the step of determining the pose, obtaining the initial pose and trajectory of the robot according to the first data, the first data including odometer data and inertial navigation data;
[0040] Step 102, the sub-map construction step, the first data is used as the initial value to perform optimal calibration on the first data through the second data, and the environmental characteristic information in the corresponding sub-map is determined according to the second data, and it is judged that the sub-map has reached the preset condition. Complete the corresponding submap construction process, and start a new sub...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More