

Industrial robot seal joint
A technology of industrial robots and joints, applied in the direction of engine seals, manipulators, mechanical equipment, etc., can solve the problems of large friction damping, reduce the layout space of seals, complicated operation, etc., to prevent the entry of foreign objects and improve the sealing stability. , the effect of reducing frictional resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
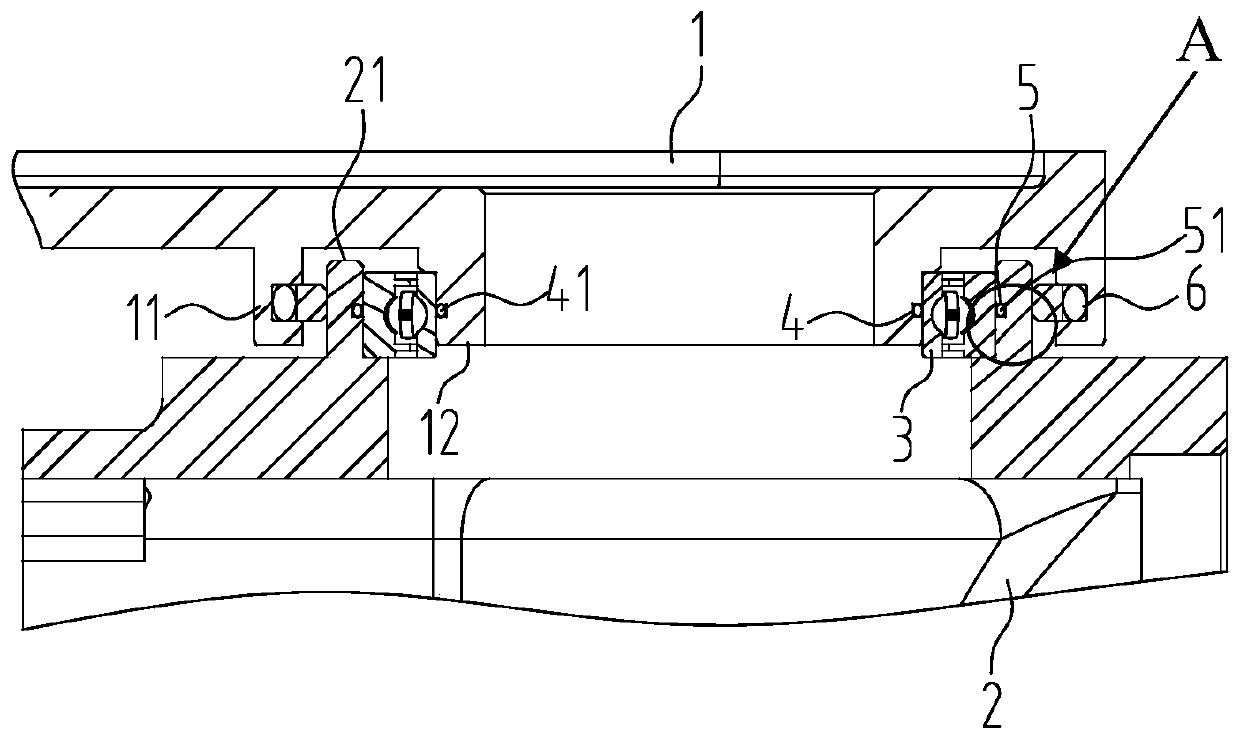
[0031] like Figure 2 to Figure 3 As shown, the outer ring of the gray ring 6 is fixed on the inner side of the outer boss 11 , and the inner ring is in contact with the outer side of the seat hole 21 . The outer ring of the gray ring 6 is fixed, and the inner ring is in rotational contact with the outer side of the seat hole 21 to form a dynamic seal.
[0032] The width of the seat hole 21 is greater than that of the self-sealing bearing 3 , and a distance of 1 mm to 2 mm is maintained between the first joint 1 and the first joint 1 . Its function is to prevent the second joint 2 from interfering with the first joint 1 when rotating.
[0033] The outer side of the inner boss 12 is provided with a first O-ring groove 4 , and the inner side of the seat hole 21 is provided with a second O-ring groove 5 .
[0034] As another improvement of this embodiment, the outer side of the inner boss 12 is provided with a first O-ring groove 4 , and the outer side of the self-sealing beari...
Embodiment approach 2
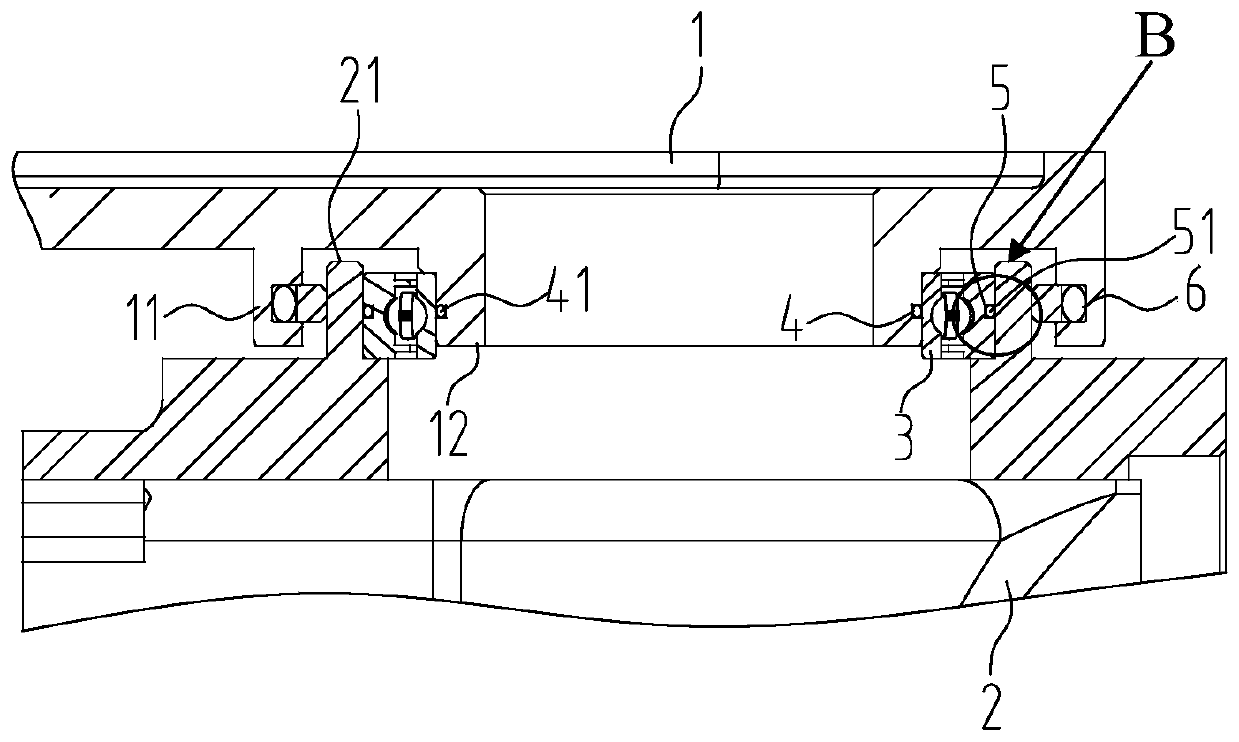
[0038] like Figure 4 As shown, the difference from Embodiment 1 is that the outer ring of the gray ring 6 is fixed inside the outer boss 11 , and the inner ring is in contact with the outer ring of the self-sealing bearing 3 . Since the surface of the outer ring of the self-sealing bearing 3 is smooth, the frictional resistance when the gray ring 6 contacts and rotates with the self-sealing bearing 3 will be reduced.
[0039] The width of the seat hole 21 is half of the width of the self-sealing bearing 3 , and a distance of 1 mm to 2 mm is kept from the first joint 1 . The self-sealing bearing 3 can be fixed on the seat hole 21 without affecting the transmission rigidity and avoiding the interference between the second joint 2 and the first joint 1 when rotating.
[0040] The outer boss 11 is stepped.
[0041] Specifically implement the installation process: First, place the first O-ring seal 41 and the second O-ring seal 51 on the first O-ring groove 4 on the outside of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More