

Dual-arm rehabilitation robot and training method
A rehabilitation robot and rehabilitation training technology, applied in the field of dual-arm rehabilitation robots and training, can solve problems such as low efficiency, high cost, and unsuitable home operation, and achieve the effects of improving training efficiency, promoting collaboration ability, and enhancing rehabilitation confidence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
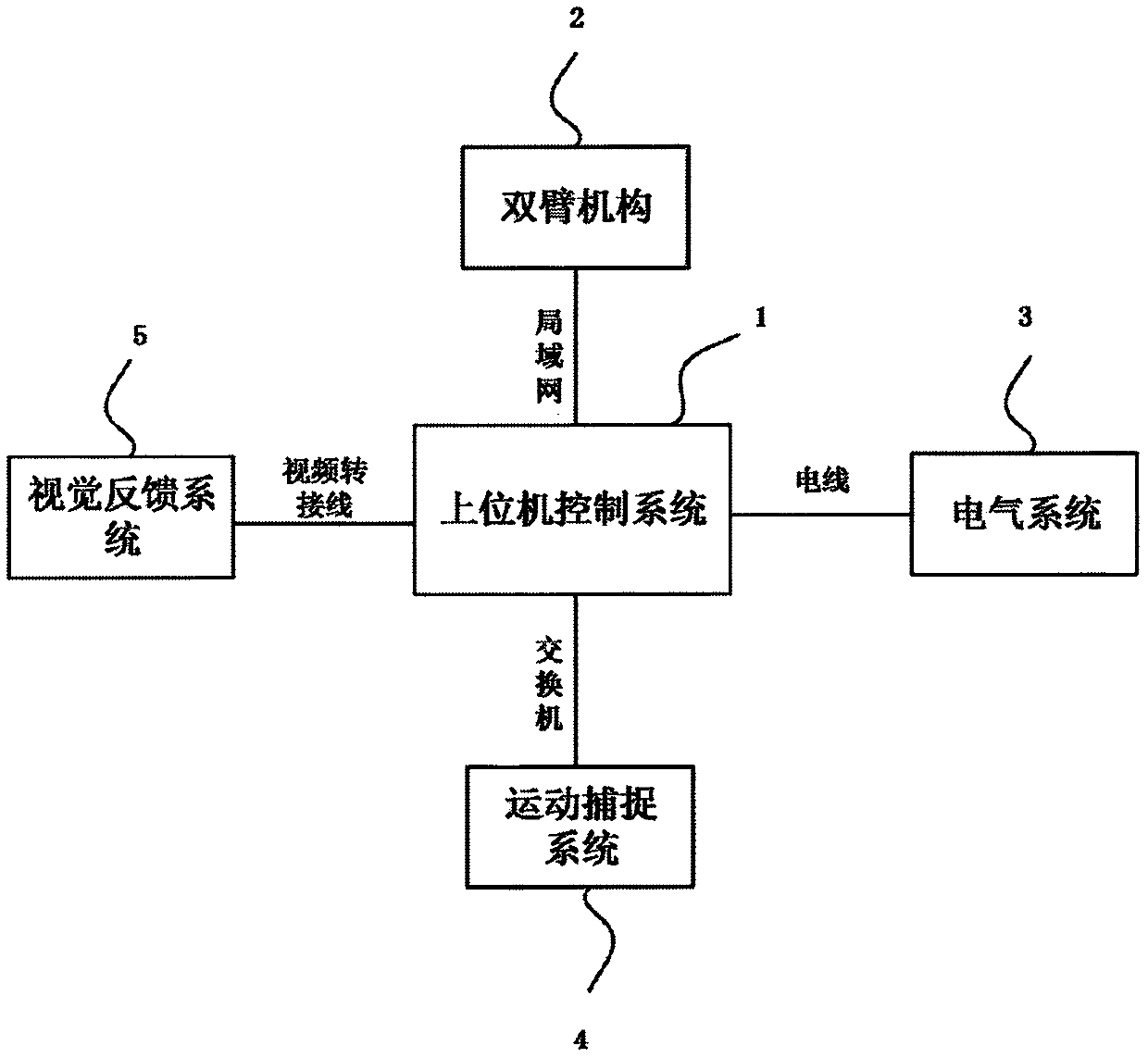
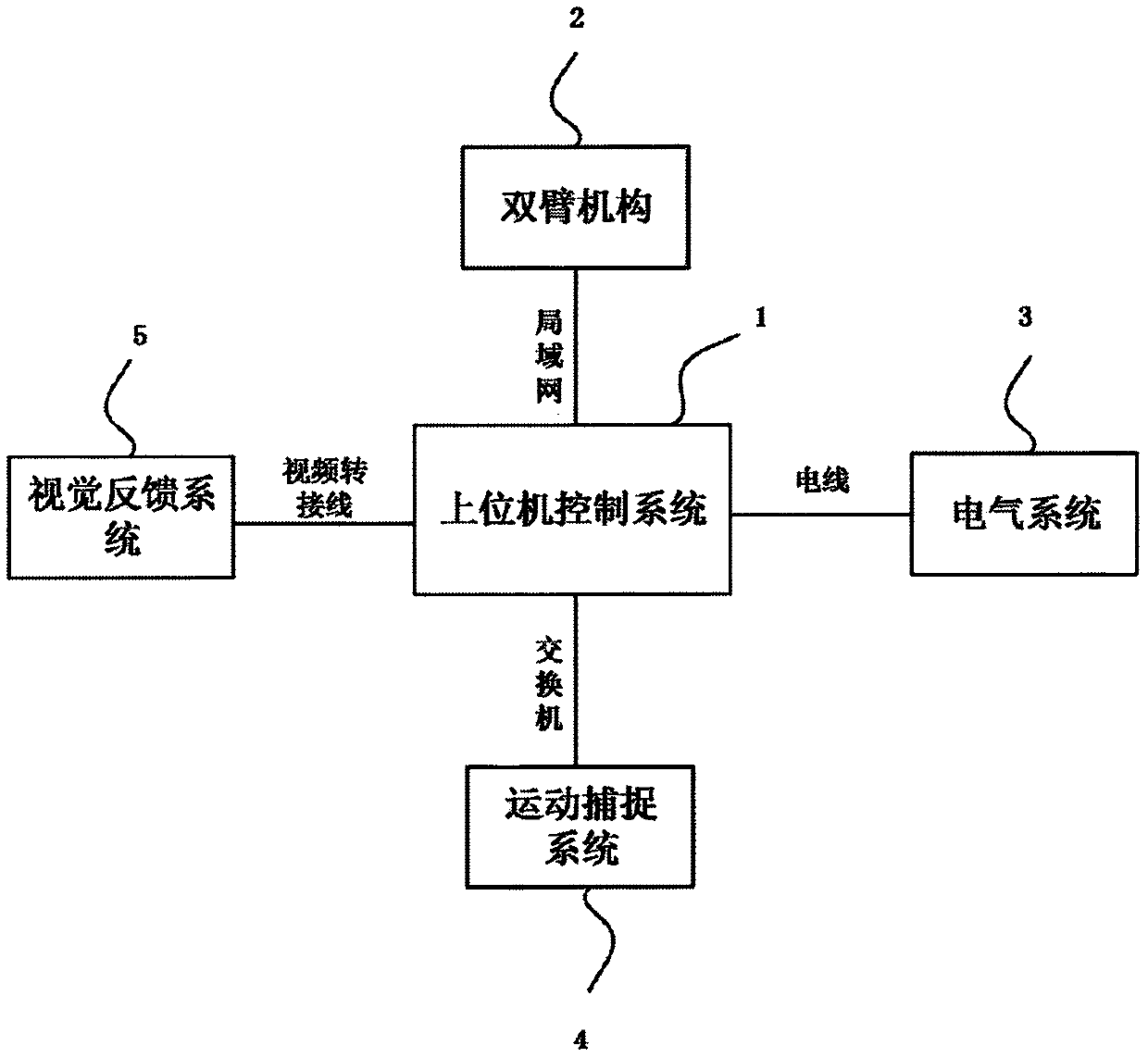
[0048] like figure 1 As shown, this embodiment provides a dual-arm rehabilitation robot, including a host computer control system 1 , a dual-arm mechanism 2 , an electrical system 3 , a motion capture system 4 and a visual feedback system 5 .
[0049] The upper computer control system 1 is used to realize the control of the dual-arm rehabilitation robot and the processing of relevant parameters in the training process.
[0050] The double-arm mechanism 2 is connected with the upper computer control system 1 through a local area network, and is used to guide patients to perform rehabilitation exercises, and realize cooperative rehabilitation training methods and mirror image rehabilitation training methods.
[0051] The electrical system 3 is connected with the upper computer control system 1 through wires, and is used for signal transmission between the systems, and completes the corresponding control work.
[0052] The motion capture system 4 is connected to the upper comput...
Embodiment 2
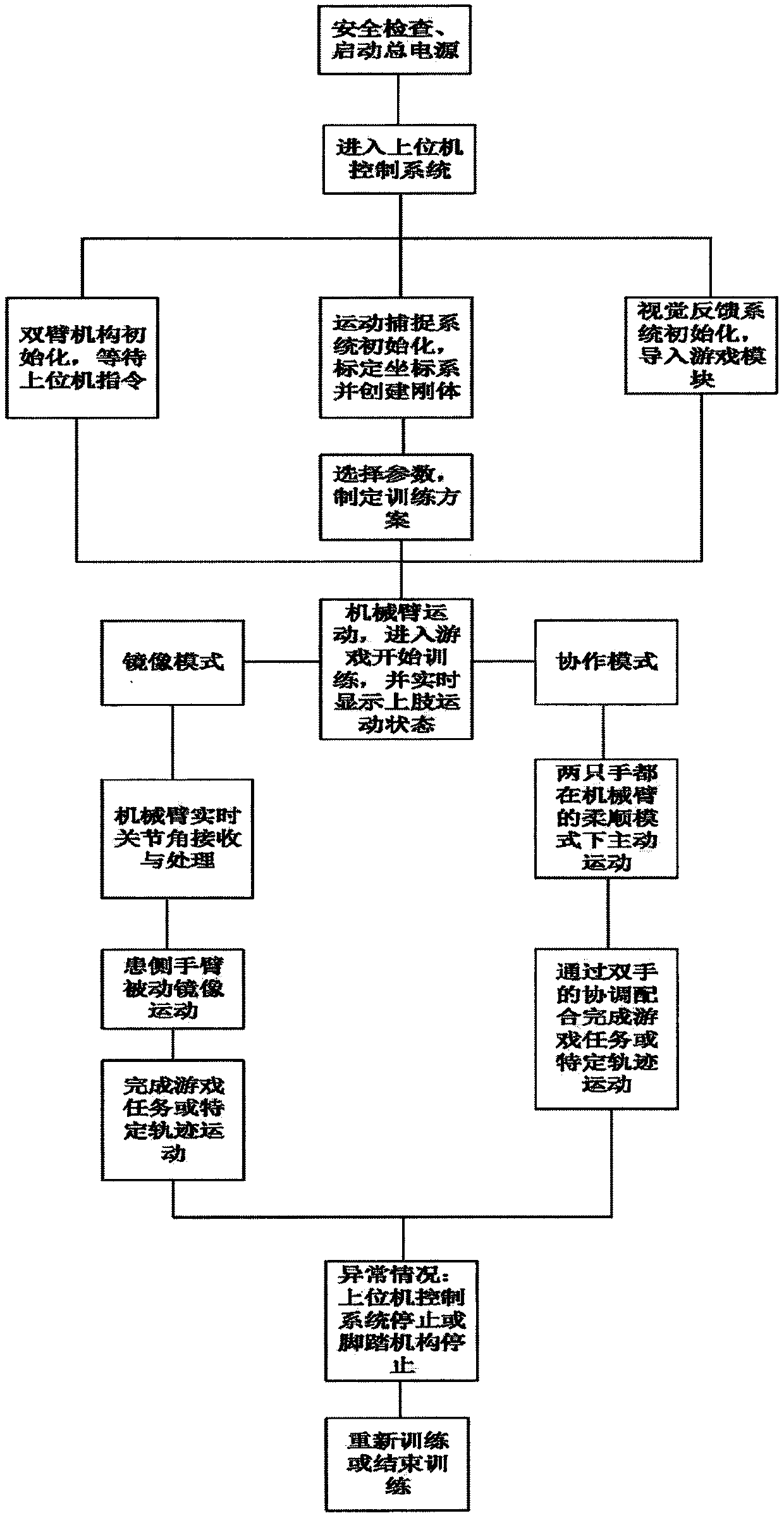
[0055] This embodiment provides a mirror image training method for a dual-arm rehabilitation robot. The mirror image training method is used to drive the arm on the affected side to perform mirror image movement by the arm on the healthy side, so as to improve the efficiency of rehabilitation. Specific steps are as follows:
[0056] Step1: Security check and system initialization. Specifically include:
[0057] Motion capture system initialization, including:
[0058] The motion capture system is calibrated, and the 6 sets of rigid bodies prepared for motion capture system capture are respectively worn on the left hand, left elbow, left shoulder, right hand, right elbow, and right shoulder.
[0059] Visual feedback system initialization: import training game.
[0060] Initialization of the dual-arm mechanism: start the dual-arm rehabilitation robot and enter the command monitoring state.
[0061]Step2: Develop a training program. Specifically include:
[0062] Enter the ...
Embodiment 3
[0070] This embodiment provides a collaborative training method for a dual-arm rehabilitation robot. The collaborative training method is used for active cooperative movement of the patient's upper limbs, and further improves the ability of the patient's arms to complete actions autonomously; the specific steps are as follows:
[0071] Step1: Security check and system initialization. Specifically include:
[0072] Motion capture system initialization, including:
[0073] The motion capture system is calibrated, and the 6 sets of rigid bodies prepared for motion capture system capture are respectively worn on the left hand, left elbow, left shoulder, right hand, right elbow, and right shoulder.
[0074] Visual feedback system initialization: import training game.
[0075] Initialization of the dual-arm mechanism: start the dual-arm rehabilitation robot and enter the command monitoring state.
[0076] Step2: Develop a training program. Specifically include:
[0077] Enter t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More