Improved JPDA track association algorithm
A technology of track association and algorithm, applied in the field of JPDA algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0058] In order to achieve the best results, this paper first analyzes the three parameters that affect the performance of the algorithm. Assuming that two targets that are close to each other are flying in parallel, the initial flight state is as follows:
[0059] Table 1 shows:
[0060] Table 1 Initial position and velocity
[0061]
[0062] Table 2 Correct interconnection probability and running time
[0063]
Embodiment 2
[0065] Cross-flying target, assuming that the initial state of two uniform-speed cross-flying targets is shown in Table 3:
[0066] Table 3 Initial position and velocity
[0067]
[0068]
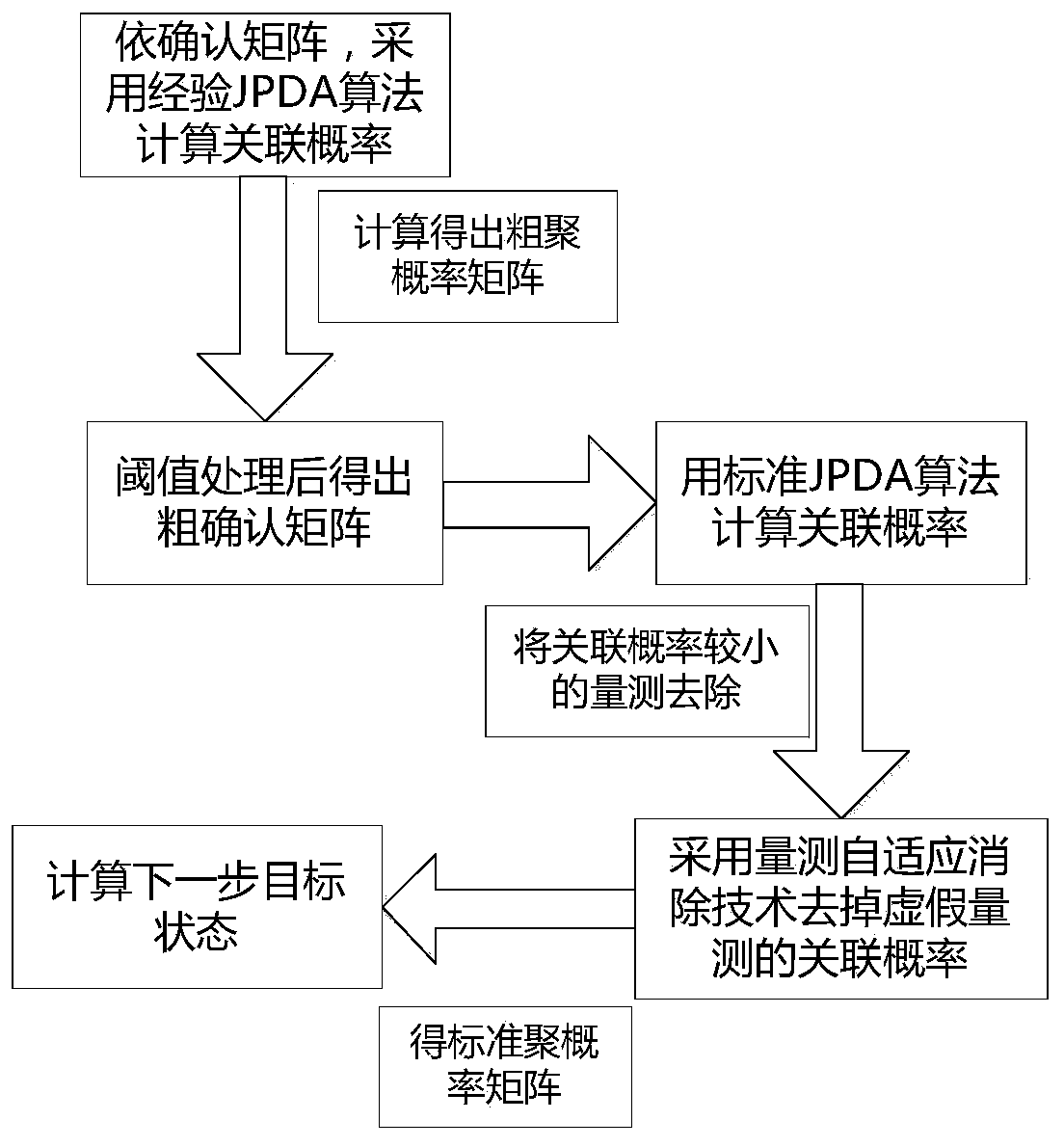
[0069] The performance of the two algorithms decreases when tracking cross targets. However, the improved algorithm in this paper discards the measurement with a small interconnection probability and retains the measurement that satisfies the formula (10-12). In essence, it belongs to the normalization of the interconnection probability after eliminating unnecessary measurements, which will lead to The remaining part of the measurement plays a more important role in the final association result than before, which is especially obvious when the target is crossed; while the SJPDA algorithm only amplifies the probability of the highest interconnection probability, when the target is crossed When cross-moving, it is likely to cause error amplification, which will inevitably lead to a dec...
Embodiment 3
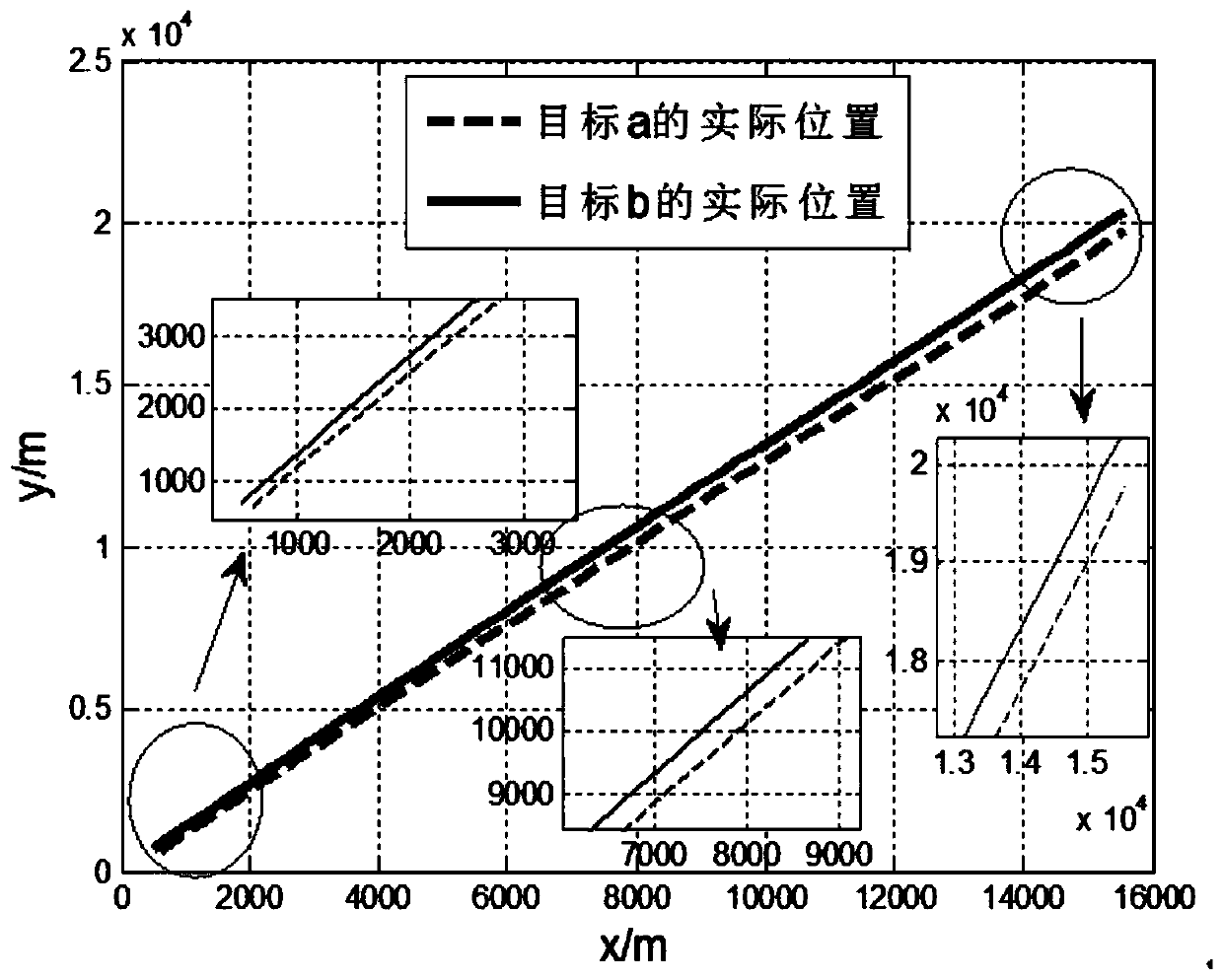
[0072] For long-distance accompanying flying targets, the following analyzes the cost-effectiveness of the three correlation algorithms for target tracking in general. The movement of the two targets is to do uniform motion first, then do circular motion for half a circle, and then continue to move at a constant speed. where the centripetal acceleration is a a =18m / s 2 , a b =16m / s 2 , the two targets take a relatively long distance for accompanying flight. Specific sports such as Figure 15 shown.
[0073] When tracking multiple targets that are far apart, the error generated largely depends on the selected dynamic model and filtering method, and the situation of wrong association will basically not happen. In this example, since all three are Kalman filter methods based on the same dynamic model, there is not much difference in tracking error. The efficiency and cost ratios of the three association methods are shown in Table 4.
[0074] Table 4 Correct interconnectio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com