

Planetary patrol device active path planning method based on compressed sensing
A path planning, compressed sensing technology, applied in the direction of the combined navigator, etc., can solve the problems of unclear planning path planning goals, low navigation and mapping accuracy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the embodiments and accompanying drawings, and the contents mentioned in the embodiments are not intended to limit the present invention.
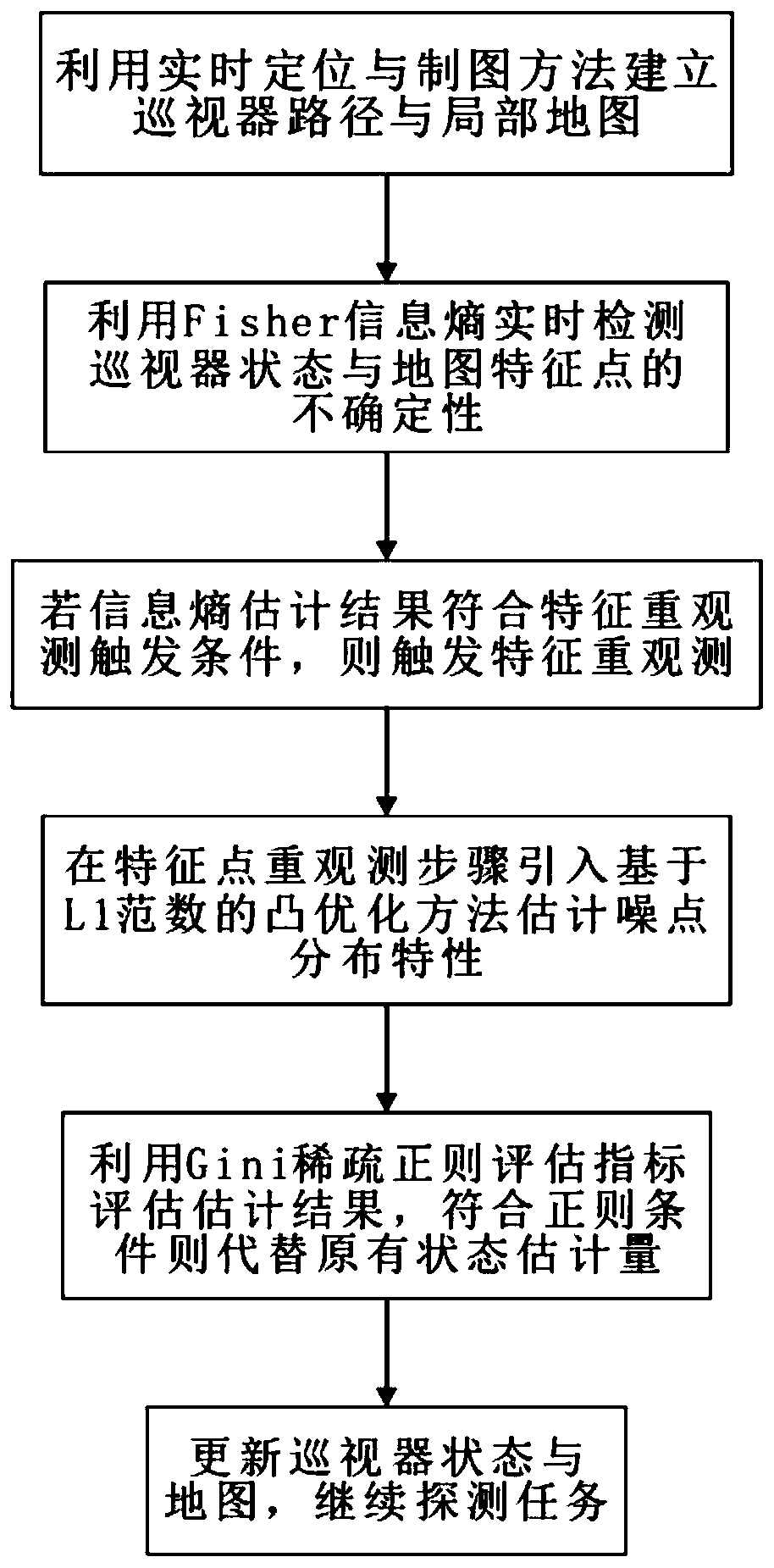
[0059] refer to figure 1 As shown, a method for active path planning of a planetary rovers based on compressed sensing of the present invention comprises the steps as follows:
[0060] 1) Use the robot positioning and mapping method to obtain the relative pose and surrounding map estimation of the planetary rover in real time, and record the state variance of the planetary rover and the covariance with the state and map feature points as a reference for the uncertainty of state estimation ;
[0061] In step 1), the method of recording the state variance and covariance of the planetary patrol is as follows:
[0062] Only the estimated variance matrix P of the relative position and relative ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More