

Visual SLAM method based on multi-feature fusion
A multi-feature fusion and vision technology, applied in image data processing, instrumentation, 3D modeling, etc., can solve problems such as the decrease of constraint force based on point features, the inability to perform stable tracking on point features, and the inability to construct environmental maps, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
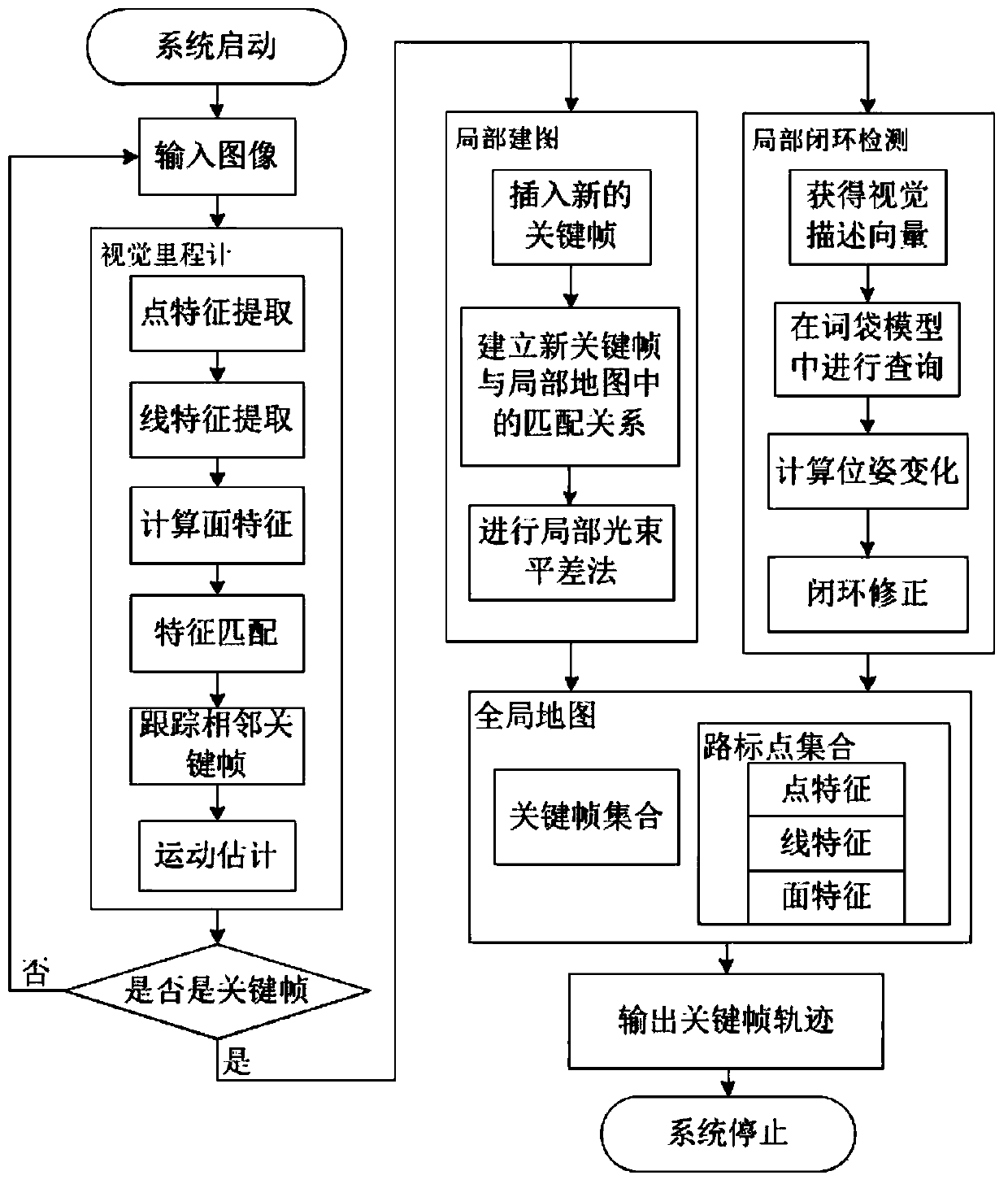
[0088] The technical solution adopted in the present invention is: a visual SLAM method based on multi-feature fusion, the specific implementation process is shown in figure 1 , mainly including the following steps:
[0089] Step 1, carry out the calibration of the depth camera, and determine the internal reference of the camera;
[0090] Step 2, for the video stream data acquired by the camera on the mobile robot platform, Gaussian filtering is performed to reduce the influence of noise on subsequent steps;
[0091] Step 3, perform feature extraction on the corrected image, extract point features and line features of each frame online, specifically include: extract FAST corner feature for each frame image, use rBRIEF descriptor to describe, and use LSD algorithm for line features Perform detection and use the LBD descriptor to describe, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More