

Hand-eye calibration method of industrial robot
An industrial robot and calibration method technology, applied in the field of industrial robot hand-eye calibration, can solve the problems of time-consuming calibration process, difficult to guarantee accuracy, and cumbersome calibration process, so as to reduce the difficulty and cost of actual operation, avoid manual operation, and achieve high-precision automatic Calibration effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
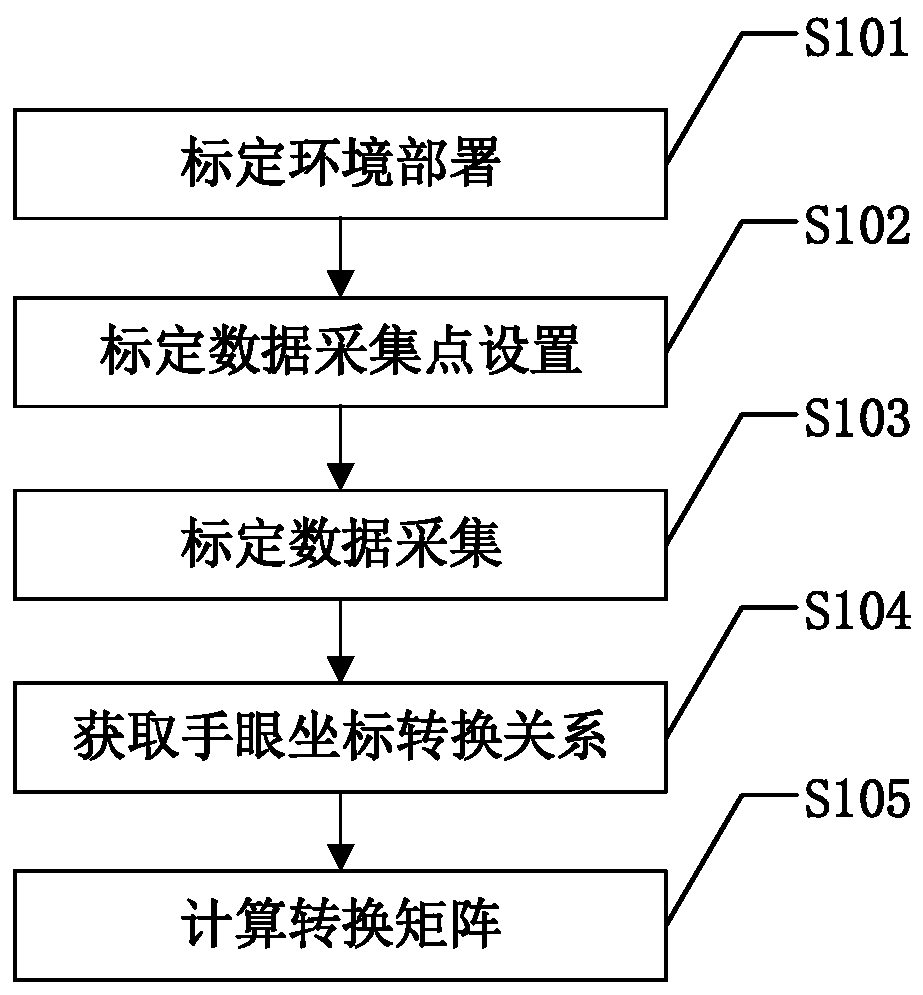
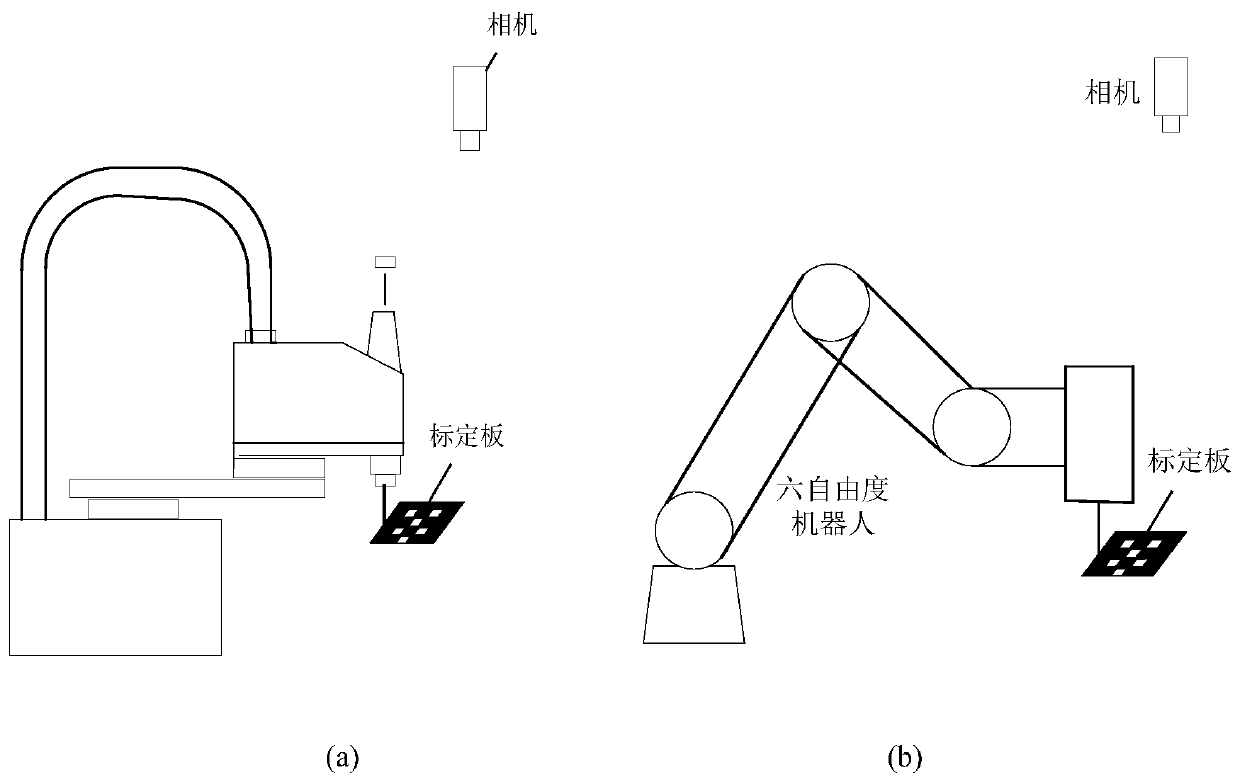
[0036] In order to better illustrate the technical scheme and technical effect of the present invention, a specific example is used for experimental verification. In this experimental verification, an industrial robot with 4 degrees of freedom is used, and its calibration environment is deployed according to figure 2 (a) is carried out, where the camera is about 1200mm high from the working plane of the industrial robot, and a camera with a resolution of 1.3 million is used. For the sake of simplicity in the description of the embodiment, in this embodiment, four calibration data collection points are selected in the working plane area of the industrial robot, and their coordinates in the base coordinate system of the industrial robot are respectively
[0037] Calibration data collection is performed at each calibration data collection point in turn, and the specific process is as follows:
[0038] Control the movement of the end of the robot manipulator arm to the fir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More