

Monocular camera and millimeter wave radar fused object identification and positioning method and system
A technology of millimeter-wave radar and object recognition, applied in neural learning methods, character and pattern recognition, computer components, etc., can solve the problems of unapplied object recognition and positioning, to overcome sparse instability, increase positioning accuracy, and system The effect of the cost advantage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
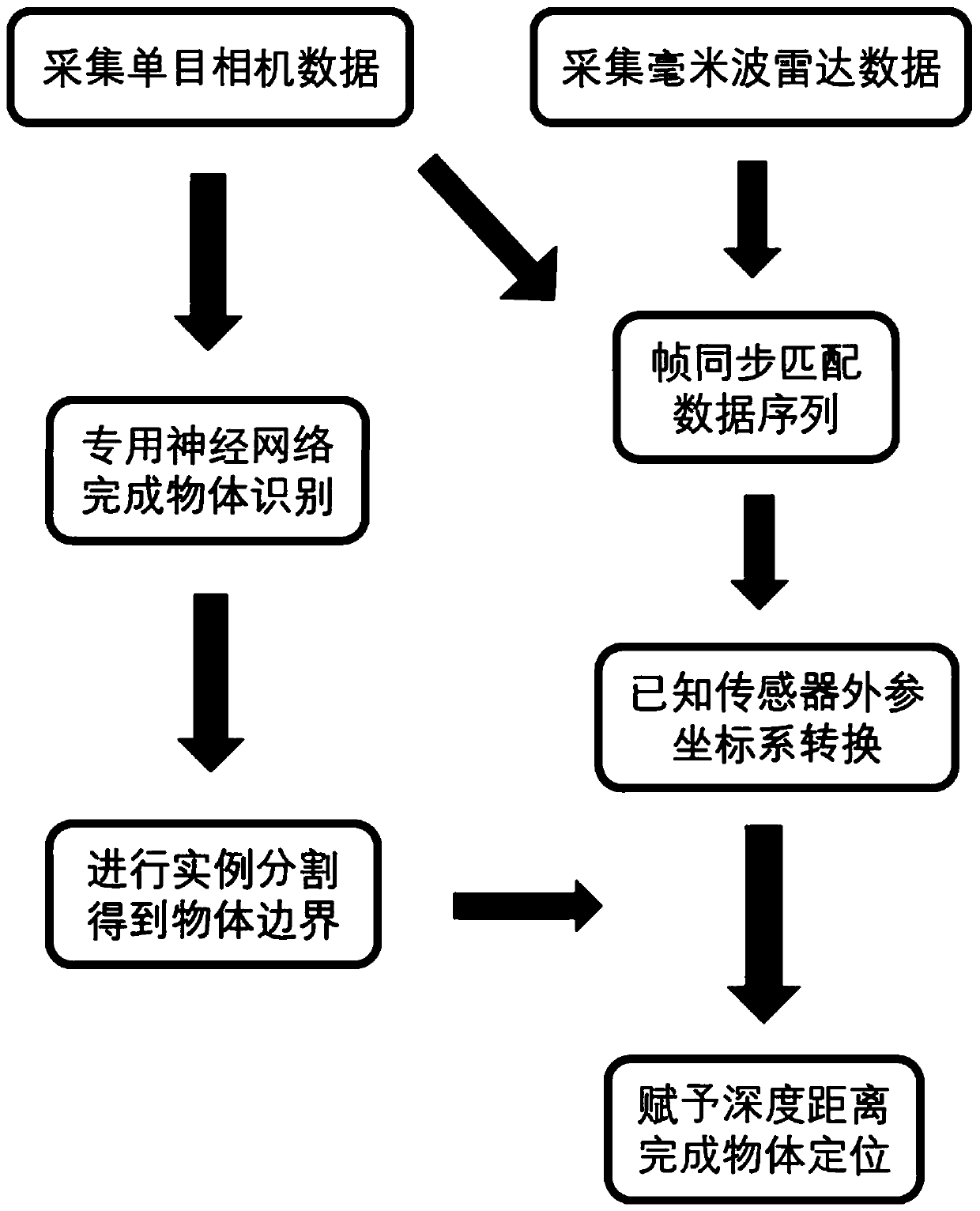
[0048] The specific implementation manners of the present invention will be described in further detail below in conjunction with the accompanying drawings. refer to figure 1 The object recognition and positioning method in the present invention will be further described.
[0049] An object recognition and positioning method based on the fusion of a monocular camera and a millimeter-wave radar, which specifically includes the following steps:
[0050] Step 1: Sensor data acquisition and frame synchronization;
[0051] 1a. Millimeter-wave radar and monocular camera data collection: After fixing the relative position of the millimeter-wave radar and monocular camera, keep the direction of the two in the same direction and overlap the field of view, and start collecting scene perception data.
[0052] 1b. Data sequence matching based on frame synchronization: After the data collection is turned on, the millimeter-wave radar and the monocular camera will generate a series of poi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More