

Crawling driving system of artillery barrel robot
A technology for artillery barrels and drive systems, which is applied to motor vehicles, weapon accessories, and weapon testing. It can solve the problems of high assembly difficulty, inability to guarantee quantification, and low accuracy. It can maintain axial movement and be easy to disassemble and maintain. , the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with accompanying drawing.
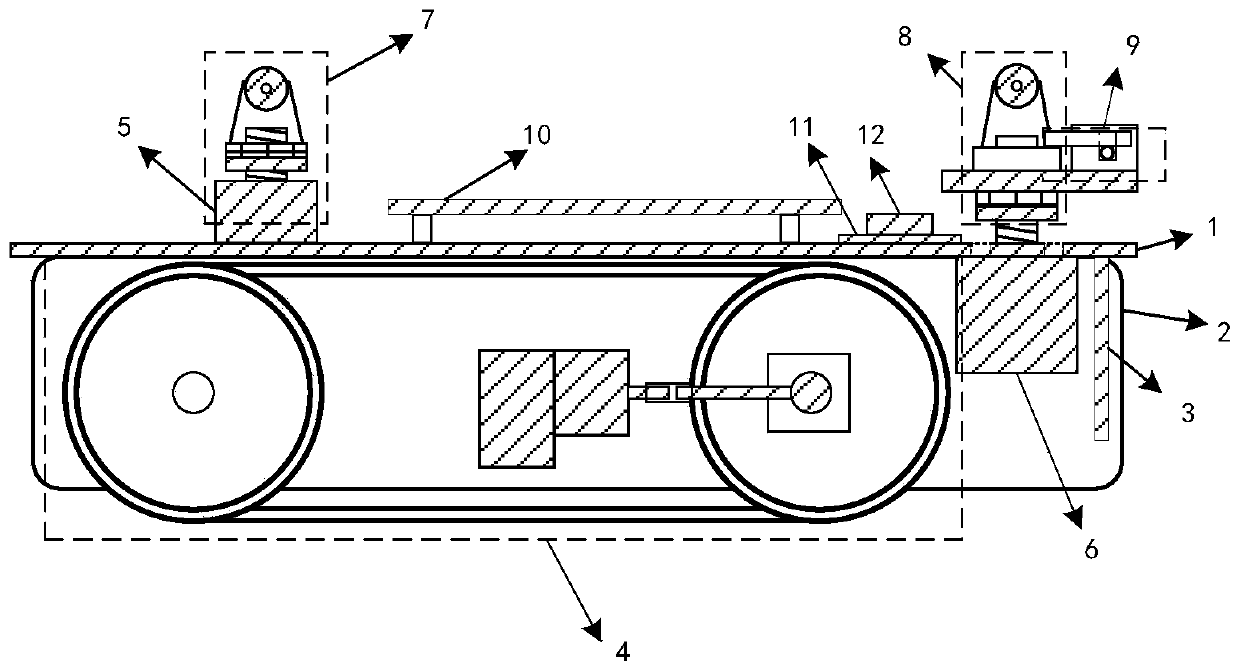
[0025] as attached figure 1 As shown, the artillery barrel robot crawling drive system of the present invention includes two vertical support plates 2 arranged in parallel intervals along the vertical direction, and the left and right sides of a horizontal top plate 1 arranged in the horizontal direction are supported and fixed on the left and right sides respectively. On the two vertical support plates 2 mentioned above. A connection plate 3 is fixed at the front end between the two vertical support plates 2, and the connection plate is used to install a measurement subsystem for measuring the shape information of the gun barrel tube wall. The measurement subsystem adopts the existing Systems, such as small industrial cameras and mechanical components or laser displacement sensors and their mechanical components.
[0026] A pulley shaft arranged in the horizontal directi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More