

Deep reinforcement learning control method for vertical surface path following of intelligent underwater robot
An underwater robot and reinforcement learning technology, applied in machine learning, vehicle position/route/height control, and target-finding control, etc., can solve problems such as control effect dependence, achieve stable learning process, good adaptability, and improve efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The following examples describe the present invention in more detail.
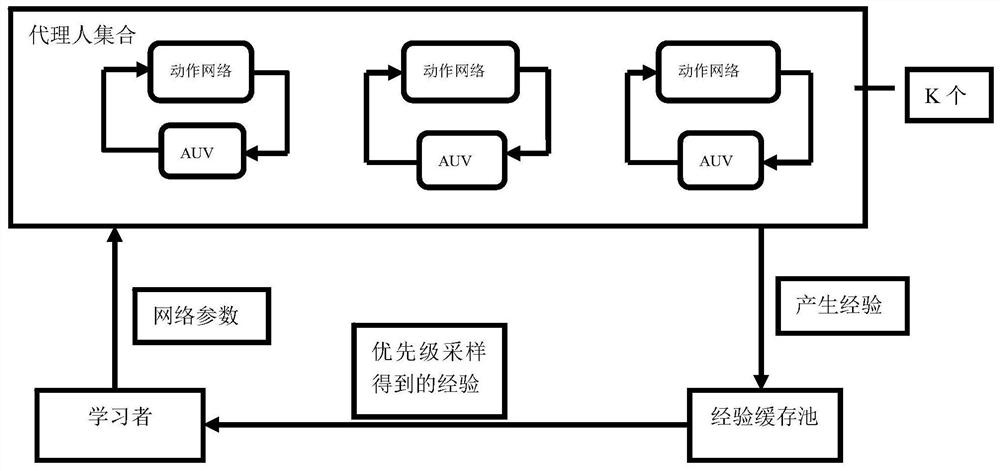
[0069] combine figure 1 Shown, is the general structural diagram of the present invention, mainly comprises:
[0070] Step 1: According to the path-following control requirements of the intelligent underwater robot, an intelligent underwater robot environment for interacting with the agent is established.
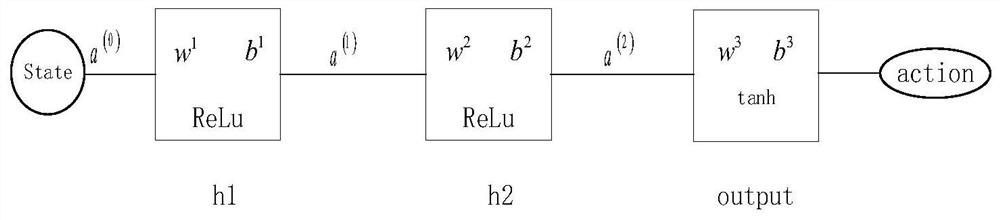
[0071] Step 2, establish a collection of agents.
[0072] Step 3: Establish an experience cache pool.
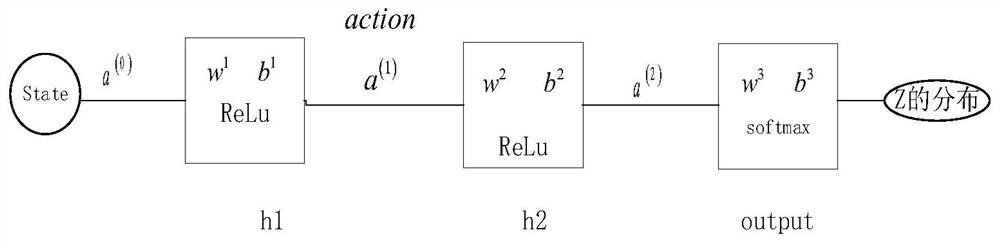
[0073] Step four, build learners.
[0074] Step 5, using distributed deterministic policy gradients for path-following control of the intelligent underwater vehicle.
[0075] The deep reinforcement learning control method for intelligent underwater robot vertical surface path following proposed by the present invention will be described in more detail below in conjunction with the accompanying drawings and specific embodiments.
[0076] Detailed implementation method of the present inventi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More