

Augmented reality method and device based on unmarked identification, equipment and medium
An augmented reality, marker-free technology, applied in the input/output process of data processing, input/output of user/computer interaction, image analysis, etc. Scale and other issues, to achieve the effect of augmented reality and good realistic effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0039] This embodiment provides an augmented reality method based on markerless recognition, aiming at positioning and tracking the camera pose and estimating the virtual scene plane through the fusion of visual SLAM and IMU. On the basis of avoiding changing the original scene, Get better augmented reality effects.
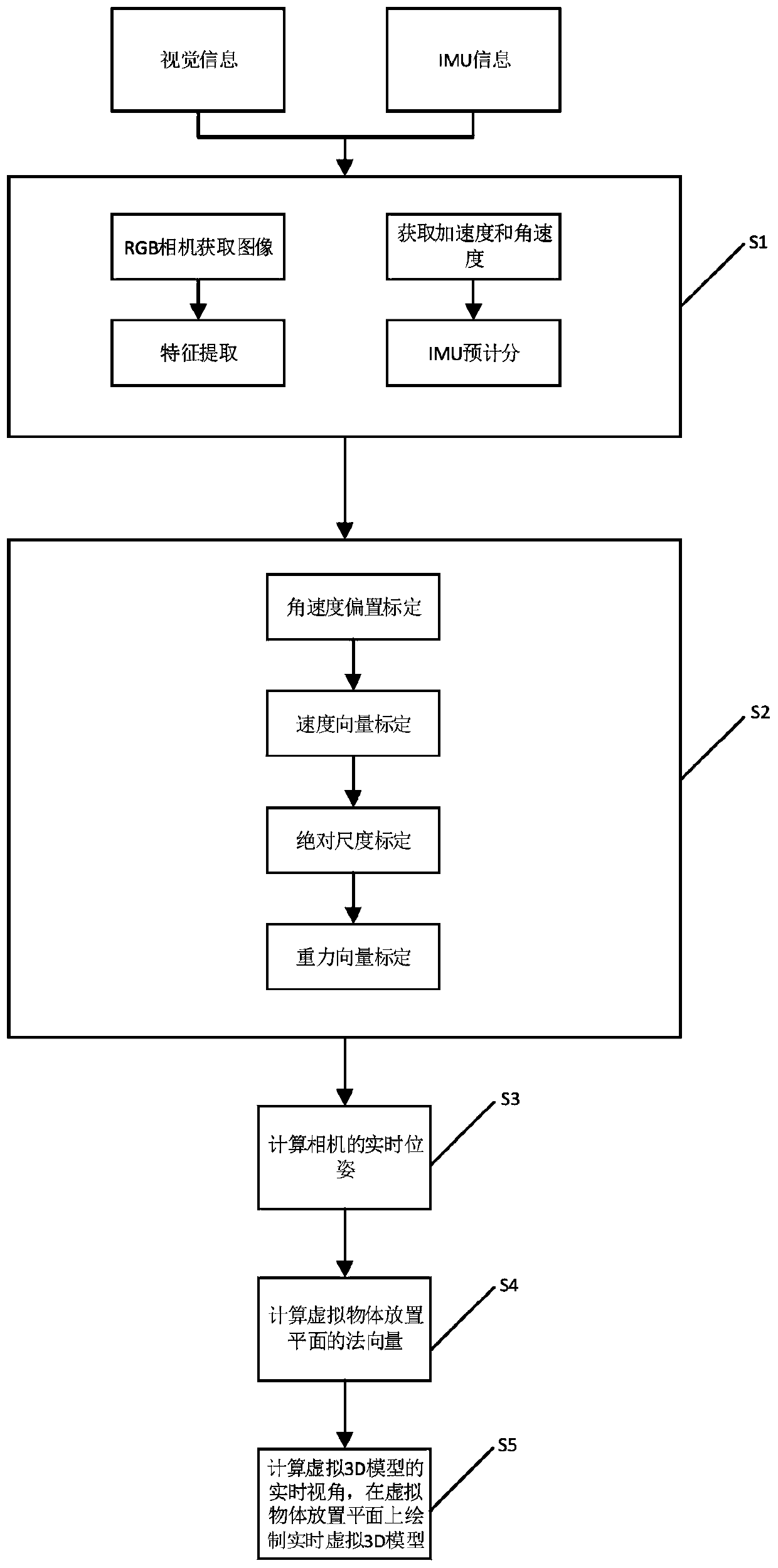
[0040] According to the above principles, the augmented reality method based on markerless recognition is introduced, such as figure 1 As shown, the augmented reality method based on marker-free recognition includes the following steps:
[0041] S1: Receive visual information and IMU information, and perform preprocessing on the visual information and IMU information;
[0042] In S1, the visual information is obtained from the visual system, and the IMU information is obtained from the inertial navigation unit. The preprocessing of the visual information is: use the RGB camera to obtain real-time 3D scene information, and extract the feature points in the image;...
Embodiment 2
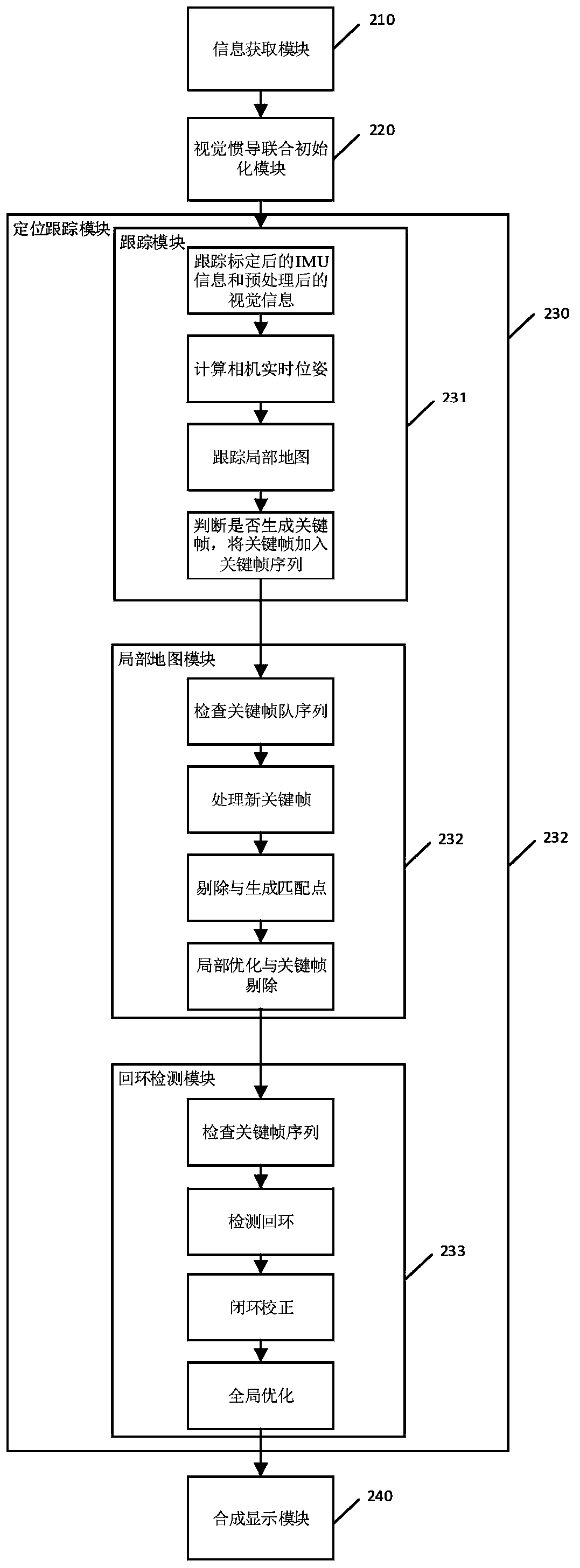
[0060] Embodiment 2 discloses a device corresponding to the augmented reality method based on markerless recognition corresponding to Embodiment 1, which is the virtual device structure of the above embodiment, please refer to figure 2 shown, including:
[0061] An information acquisition module 210, configured to acquire visual information and IMU information, and preprocess the visual information and IMU information;
[0062] The visual-inertial navigation joint initialization module 220 performs angle offset calibration and velocity vector, absolute scale, and gravity vector calibration based on the IMU information;
[0063] Positioning and tracking module 230, using the information calibrated by the visual-inertial navigation joint initialization module to obtain the real-time pose of the camera;
[0064] Synthesis and display module 240, according to the real-time pose and gravity vector calibration of the camera, respectively calculates the display angle of view of the...
Embodiment 3
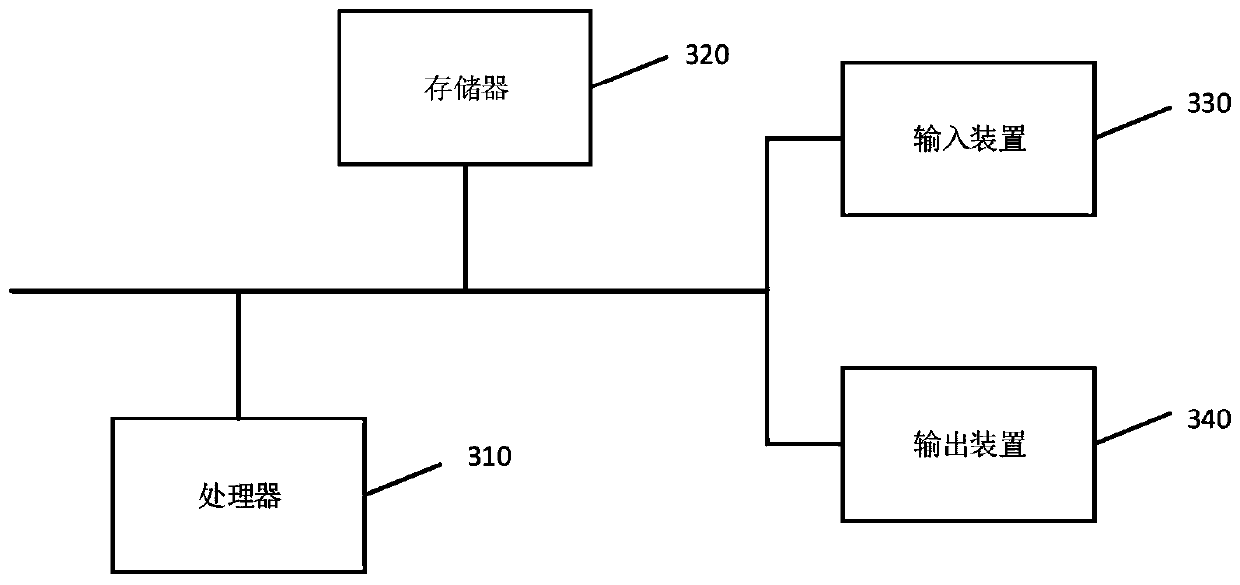
[0067] image 3 A schematic structural diagram of an electronic device provided by Embodiment 3 of the present invention, such as image 3 As shown, the electronic device includes a processor 310, a memory 320, an input device 330, and an output device 340; the number of processors 310 in a computer device may be one or more, image 3 Take a processor 310 as an example; the processor 310, memory 320, input device 330 and output device 340 in the electronic device can be connected by bus or other methods, image 3 Take connection via bus as an example.
[0068] The memory 320, as a computer-readable storage medium, can be used to store software programs, computer-executable programs and modules, such as program instructions / modules corresponding to the augmented reality method based on markerless recognition in the embodiment of the present invention (for example, based on markerless recognition information acquisition module 210, joint visual-inertial navigation initializati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More