

Suspended-cable parallel robot for coal bunker inner wall defect detection and control method
A technology of defect detection and robotics, applied in the direction of program control manipulators, instruments, manipulators, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
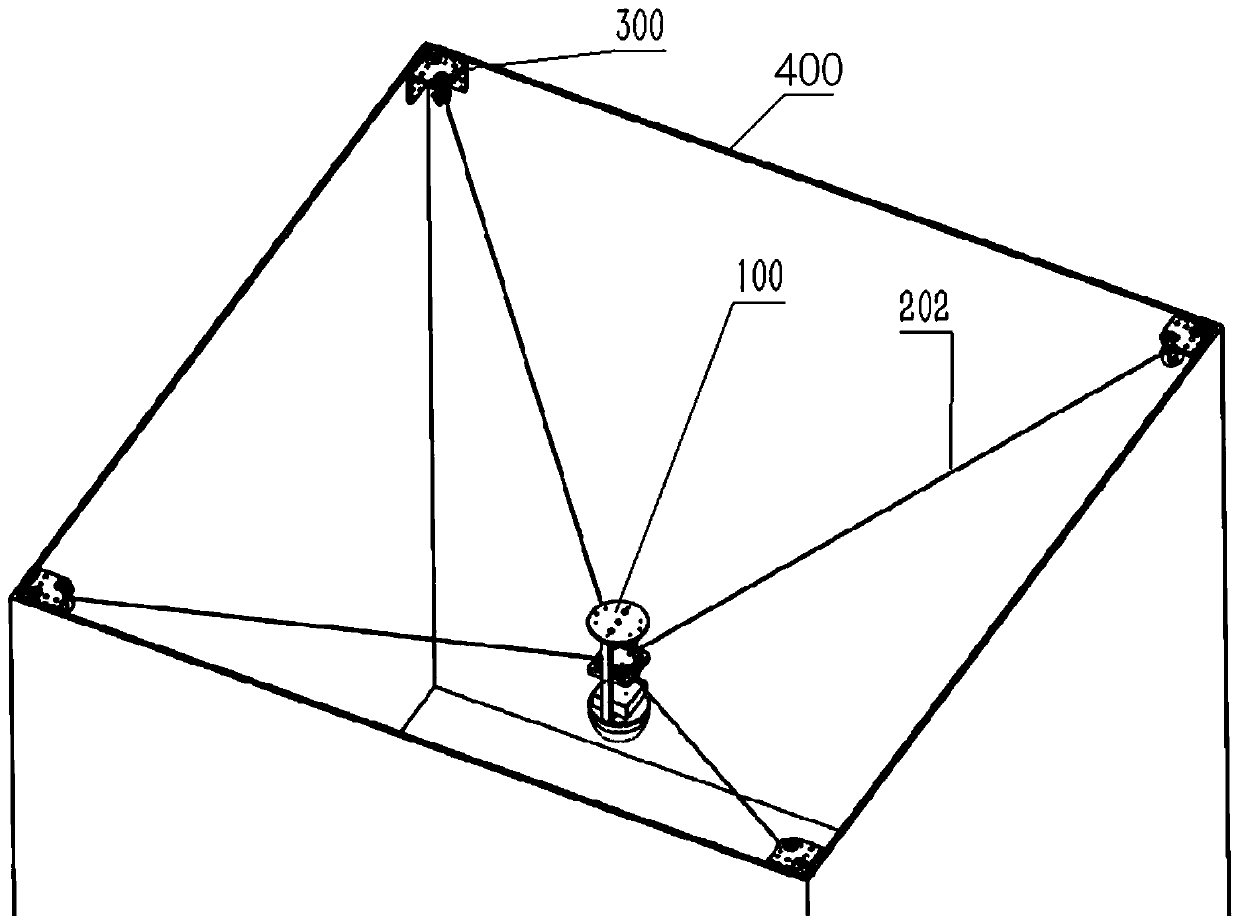
[0084] A cable-suspended parallel robot for detecting defects on the inner wall of a coal bunker according to an embodiment of the present invention, such as figure 1 installed as shown.
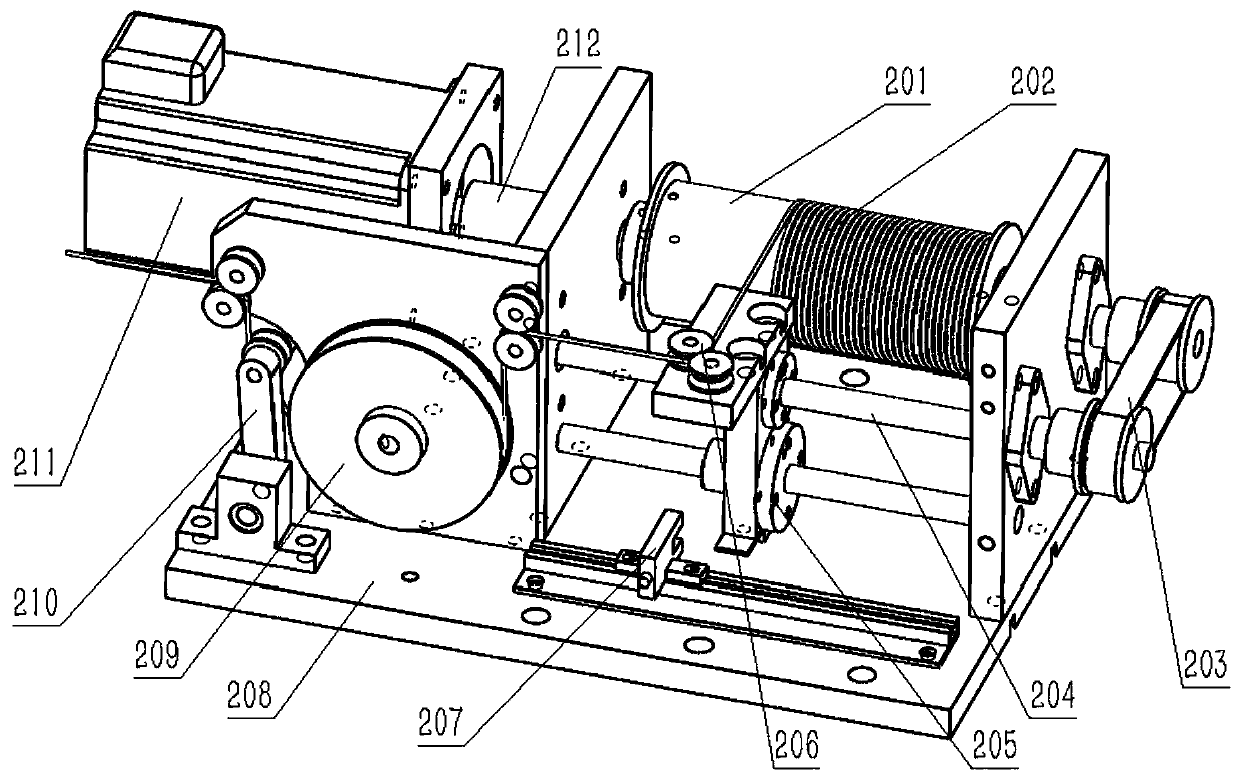
[0085] 4 pulley mechanisms (300) are fixed on 4 corners of the coal bunker (400), such as figure 1 . The winding drum (201) is connected with the servo motor (211) through a coupling (212).
[0086]The four servo mechanisms (200) all include a winding drum (201), a linear bearing (205), an installation base plate (208), a crimping mechanism (210), an encoder (2013), an encoder wheel (209), Servomotor (211), described winding drum (201) is connected with servomotor (211) by shaft coupling (212), and flexible rope winds through described crimping mechanism (210), encoder wheel ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More