

GNSS ionospheric normalization and fusion modeling method enhanced by leo satellite
A modeling method and ionospheric technology, applied in satellite radio beacon positioning systems, radio wave measurement systems, instruments, etc., can solve the problem of uneven global distribution of GNSS ground tracking stations, different detectable ranges of the ionosphere, and effective observation arcs. paragraph short
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0100] Step 1. Construct a full-path global ionospheric model based on ground-based GNSS observation data, and obtain ground receiver hardware delay and GNSS satellite hardware delay by synchronous estimation. When estimating the hardware delay of different GNSS satellite terminals, a benchmark with the deviation sum of hardware delay of different GNSS satellite terminals being zero is used.
[0101] Step 2, build the global ionospheric model of the lower part of LEO, and estimate and obtain the hardware delay of the LEO satellite terminal synchronously. In order to maintain self-consistency, the same single-layer model height as in step 1 can be selected, and the satellite-side hardware delay deviation of all observable LEO satellites "sum to be zero" is selected as the baseline constraint.
[0102] Step 3: Construct the upper global ionosphere model of LEO, and simultaneously estimate and obtain the hardware delay deviation of the LEO onboard GNSS receiver.
[0103] Step 4....
Embodiment 2
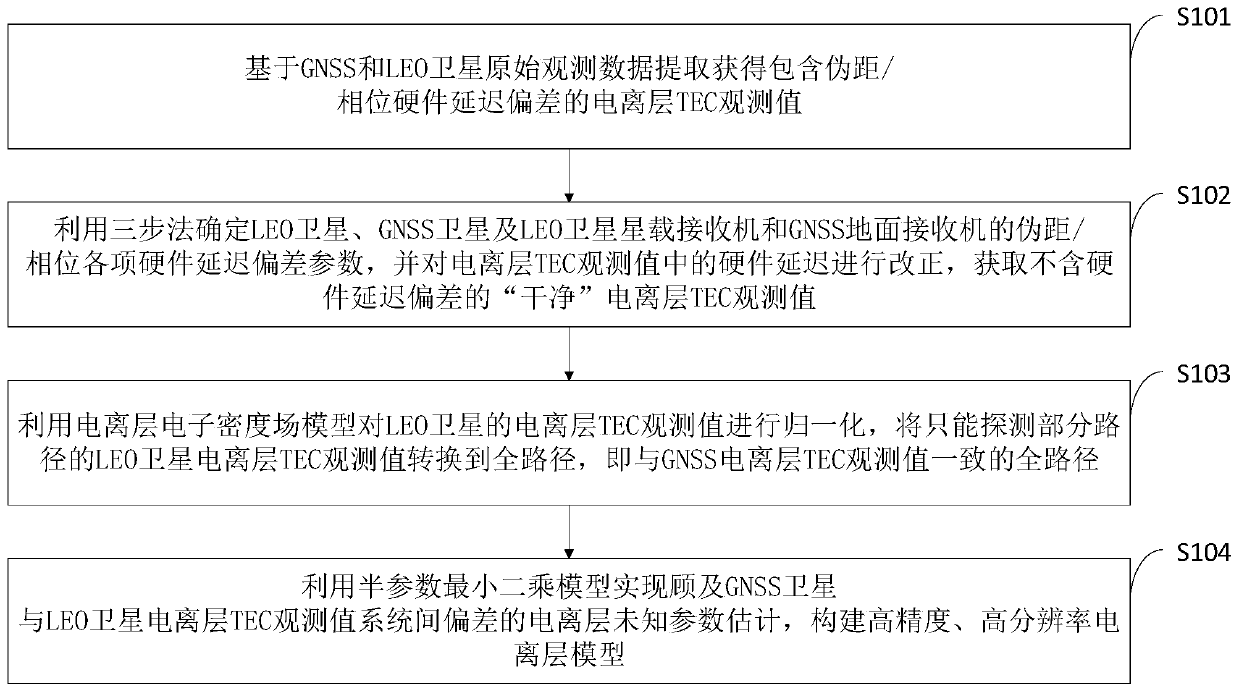
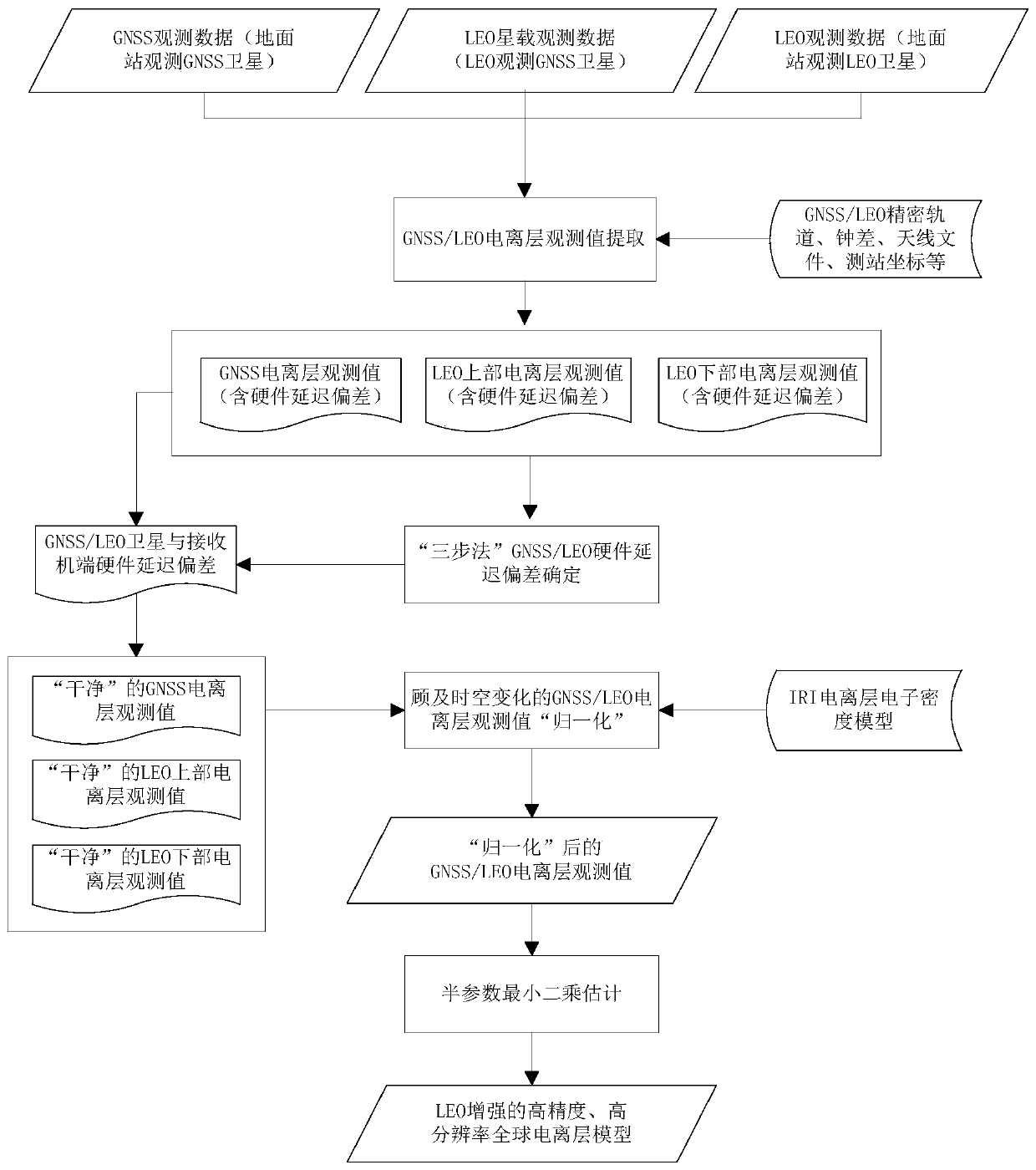
[0110] Step 1, extraction of ionospheric TEC observations based on GNSS / LEO observations.
[0111] Step 2, GNSS / LEO receiver and satellite terminal hardware delay deviation is accurately determined.
[0112] Step 3, "normalize" the GNSS / LEO ionospheric observations based on the background field model of the IRI model.
[0113] Step 4, GNSS / LEO ionospheric parameter estimation of the semiparametric compensated least squares model.
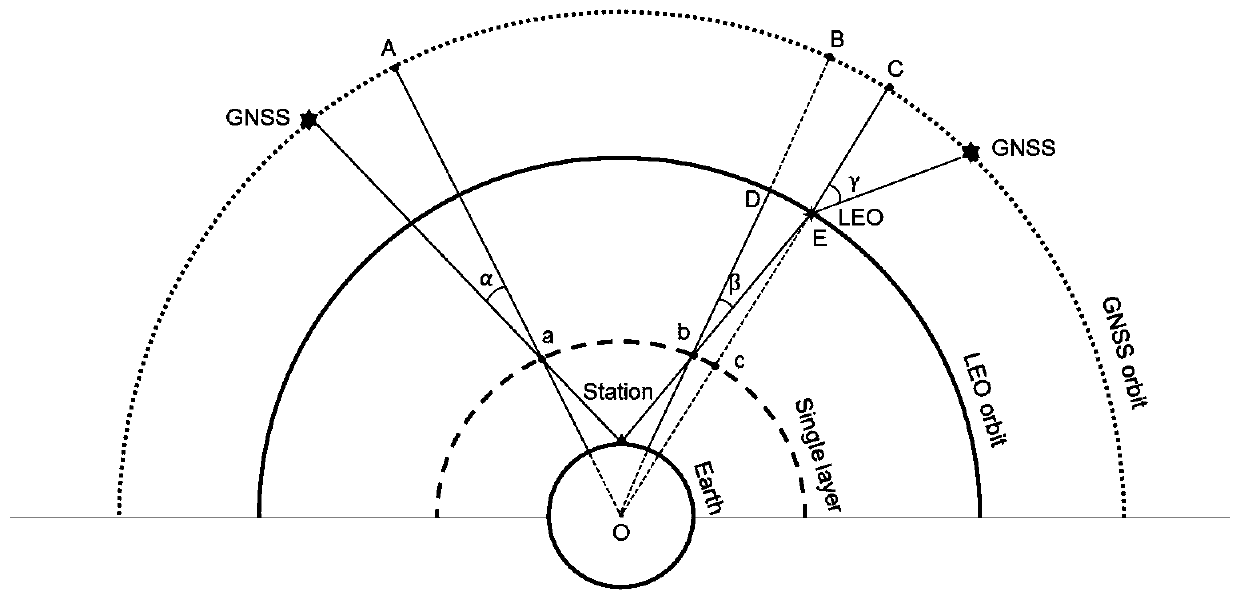
[0114] In the embodiment of the present invention, the GNSS / LEO signal in step 1 mainly includes two commonly used observations, code measurement pseudorange and carrier phase. For the present invention, observation equation comprises three parts: the observation equation (formula 1) of GNSS satellite receiver to satellite, the observation equation (formula 2) of LEO satellite GNSS receiver to satellite and the observation equation of GNSS satellite receiver to LEO satellite (Formula 3), the specific expression is
[0115]
[0116]
[0117]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More