

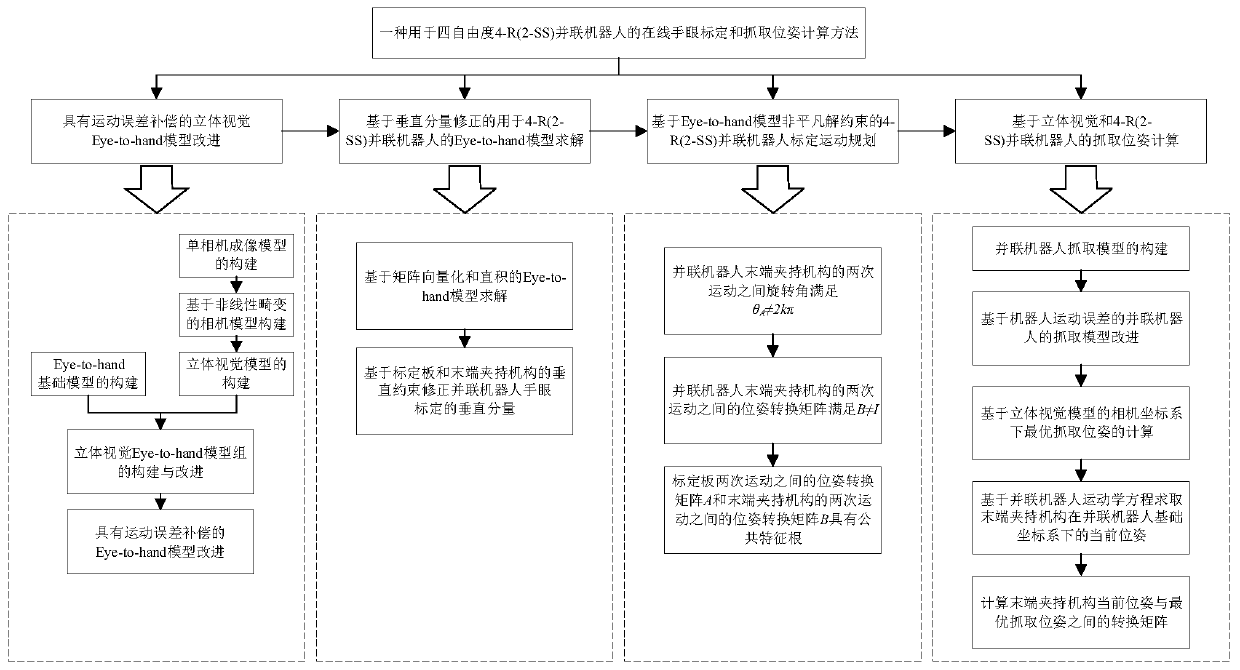
Online hand-eye calibration and grabbing pose calculation method for three-dimensional vision hand-eye system of four-degree-of-freedom parallel robot
A technology of stereo vision and hand-eye calibration, applied in computing, manipulators, program-controlled manipulators, etc., can solve the problem that the vertical component of parallel robots cannot be accurately obtained.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
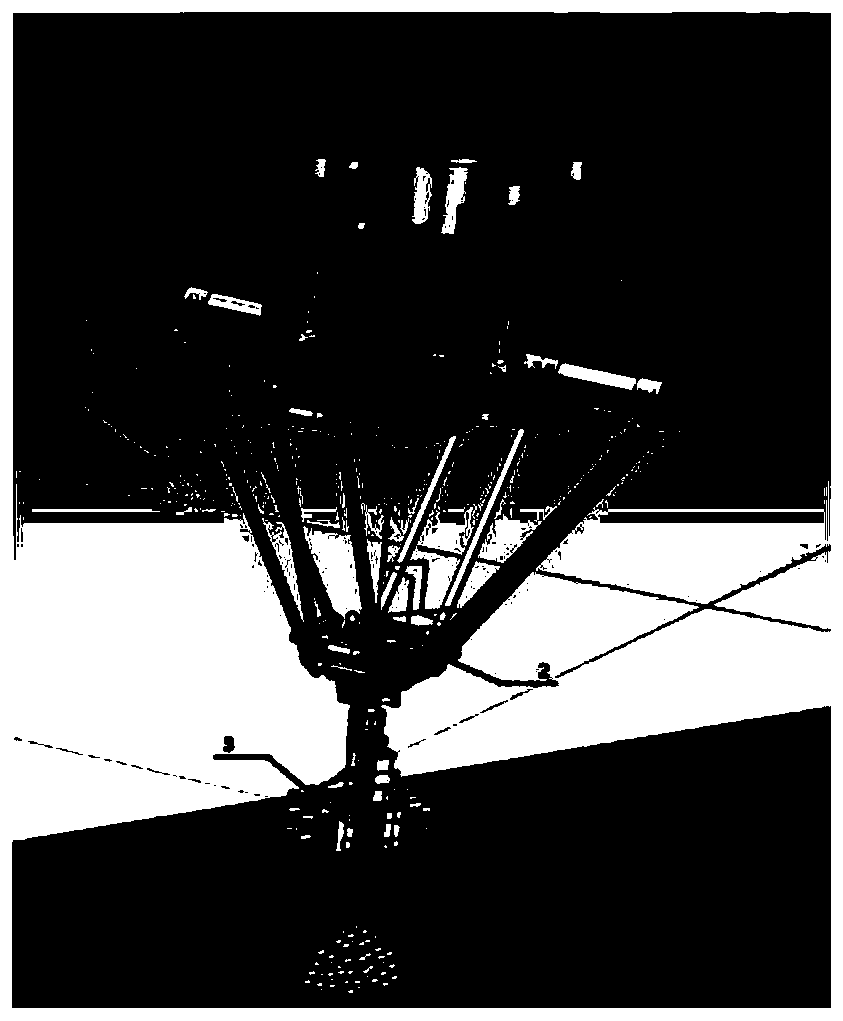
[0139] Specific embodiments are described by taking a new type of 4-R (2-SS) parallel robot fruit sorting system developed by our research group as an example, and white rosa grape bunches as the grasping objects. Its specific implementation is as follows:
[0140] 1. Improved stereo vision Eye-to-hand model with motion error compensation. Specific steps are as follows:
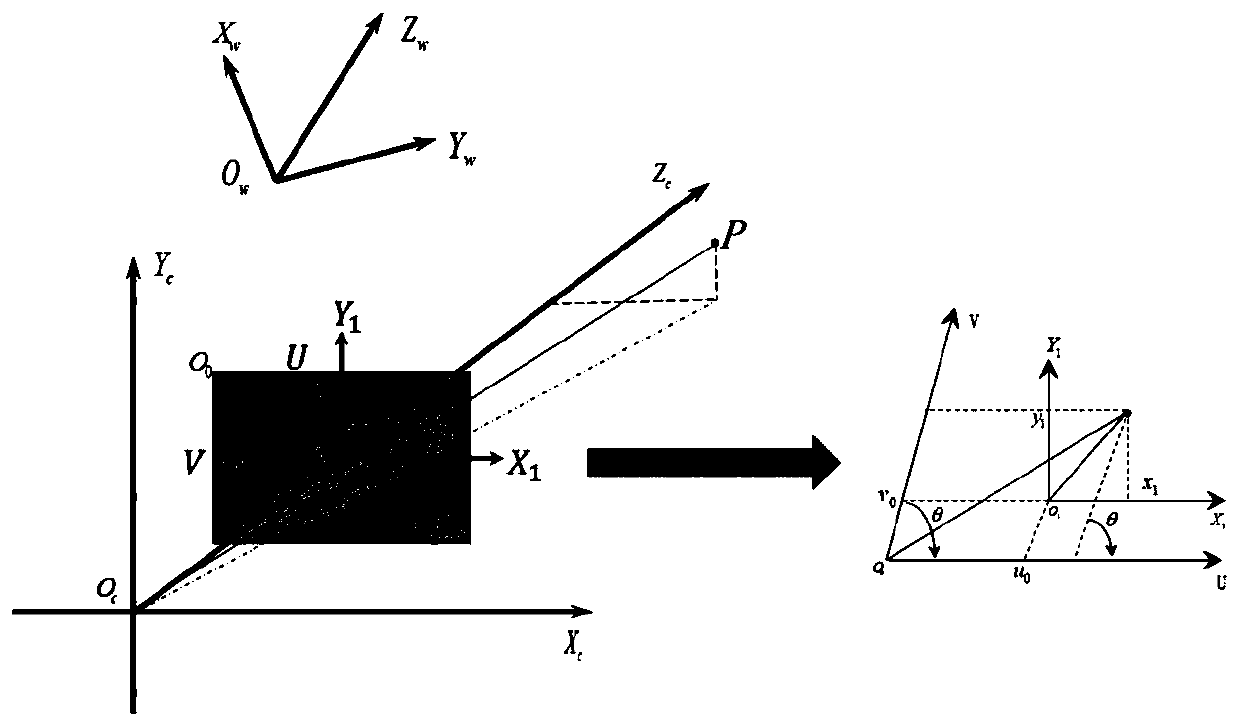
[0141] (1) Construction and improvement of stereo vision Eye-to-hand model group. The present invention improves the Eye-to-hand basic model AX=XB based on the results of binocular calibration and in combination with the relative poses of the color camera and the infrared camera. First, the color camera and the infrared camera are modeled separately, and the following can be obtained:
[0142]
[0143] Based on the stereo vision model, formula (1) is transformed, and the improved stereo vision Eye-to-hand model group is obtained:
[0144]
[0145] (2) Improved Eye-to-hand model with motion error com...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More