

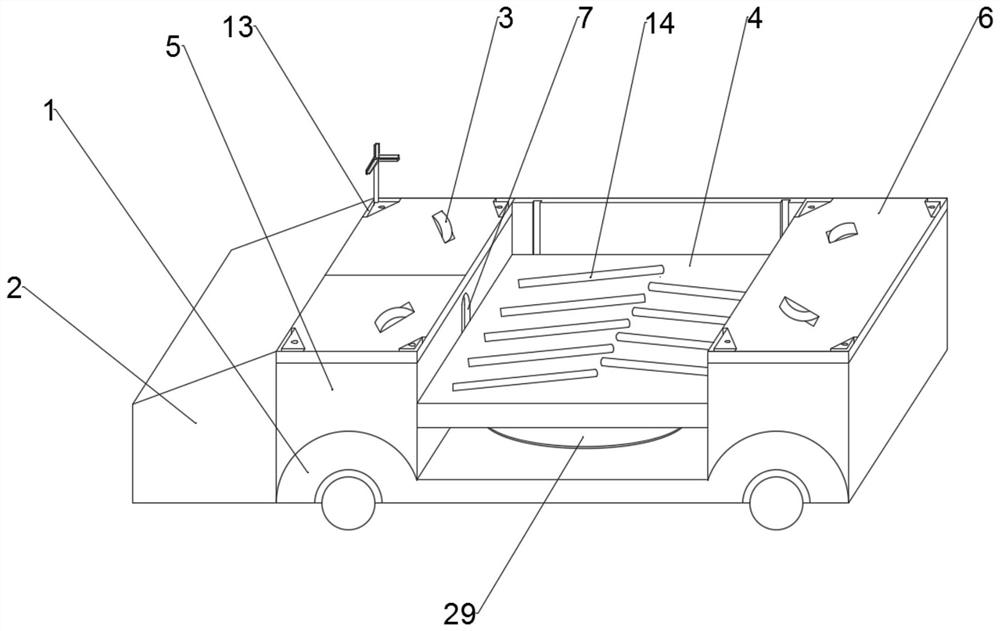
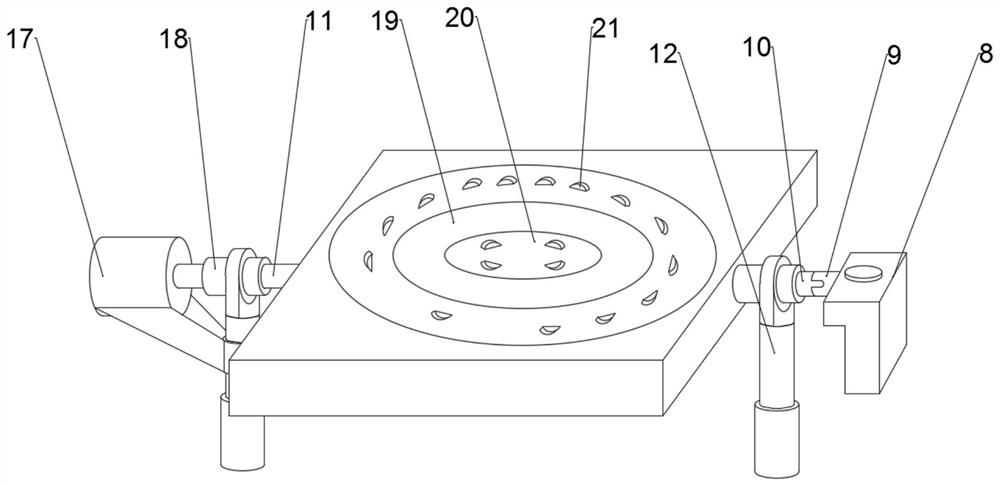
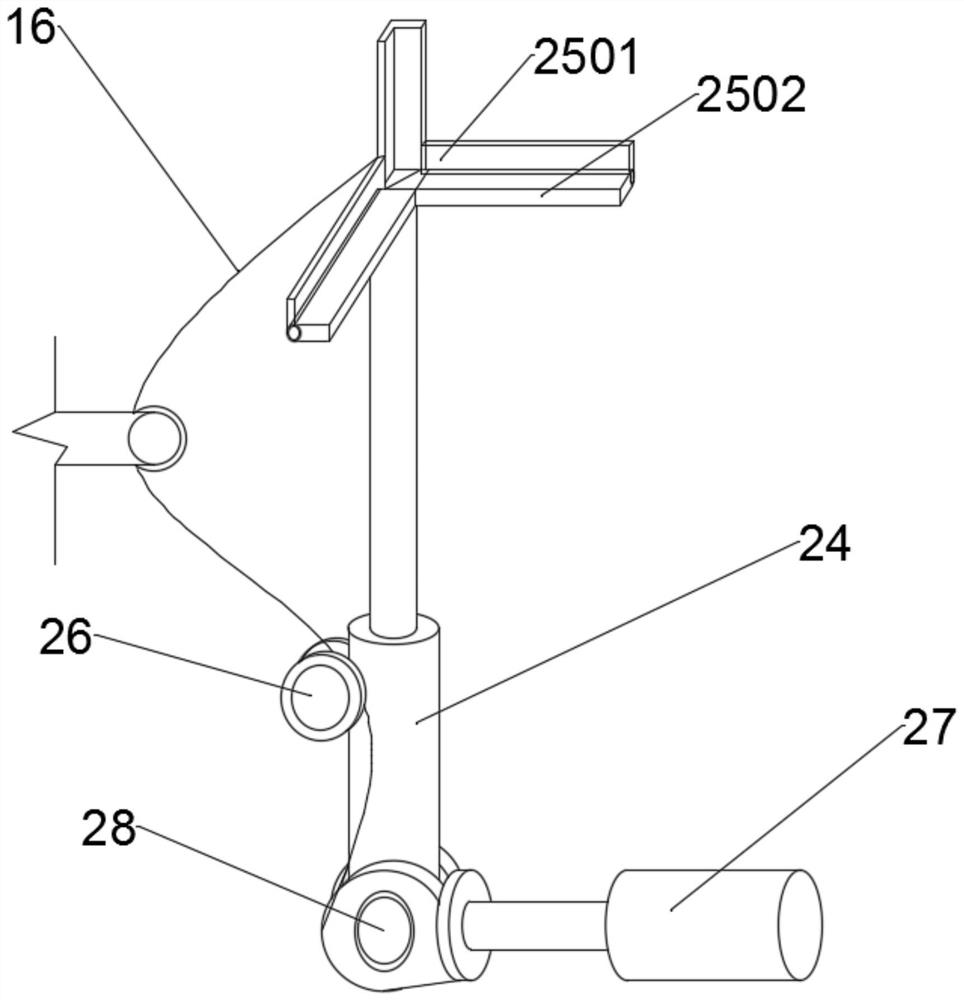
A variable clamping device for an automatic guided trolley and an object positioning and clamping method
A technology for automatically guiding trolleys and clamping devices, applied in transportation and packaging, mechanical conveyors, conveyors, etc., can solve problems such as the complex structure of automatic trolleys, and achieve the effect of improving mobilization efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
[0050] An article positioning and clamping method of a variable clamping device that automatically guides a trolley, comprising specific steps:
[0051] S100. The monitoring server of the automatic guided vehicle receives and sets the positioning signal of the distance measuring device of the storage system;
[0052] S200. The monitoring server turns on the four infrared laser emitters arranged on its surface. Each laser beam of the infrared laser emitter forms a detection surface with a plane constraint equation. The photoelectric receiver receives the pulse signal to form a photoelectric signal of two plane constraint equations;
[0053] S300. The integrated chip module set in the automatic guided vehicle obtains the change of the positional relationship of the goods before entering the corner clamp device by solving the mathematical model of the detection surface and the photoelectric signal;
[0054] S400, furthermore, the integrated chip module converts the calculation r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More