

Hand posture estimation and tracking method based on depth data
A hand posture and hand technology, applied in the field of hand motion posture estimation and tracking, can solve the problems of multi-computing resources and time, manual marking time-consuming and labor-intensive, and restricting accuracy, so as to achieve high computing efficiency, save computing resources and Time and real-time effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0054] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
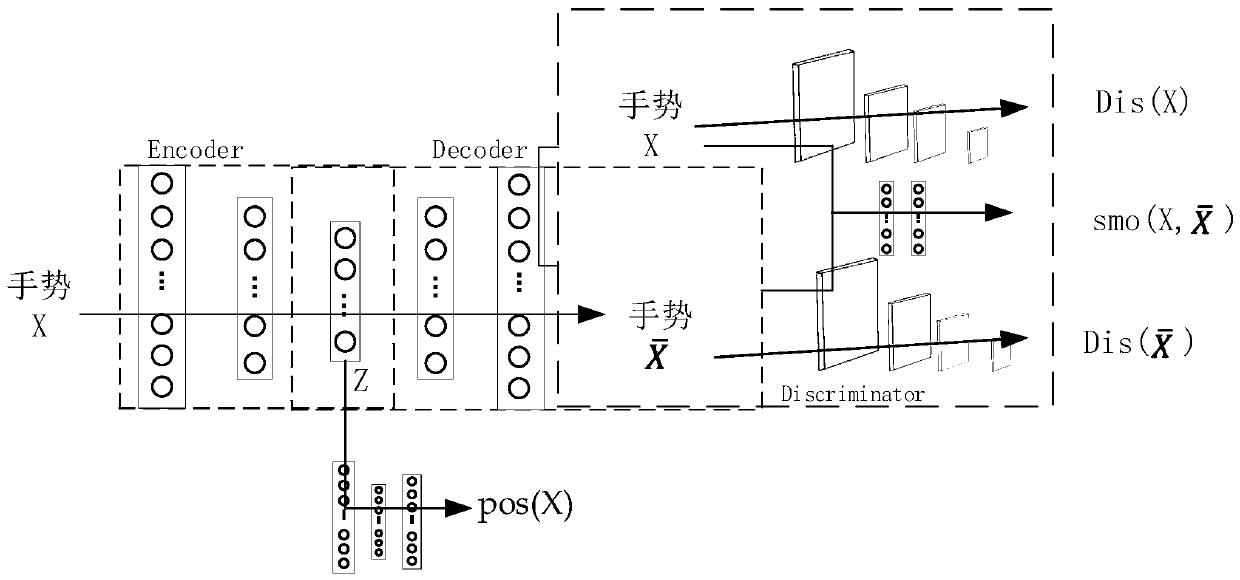
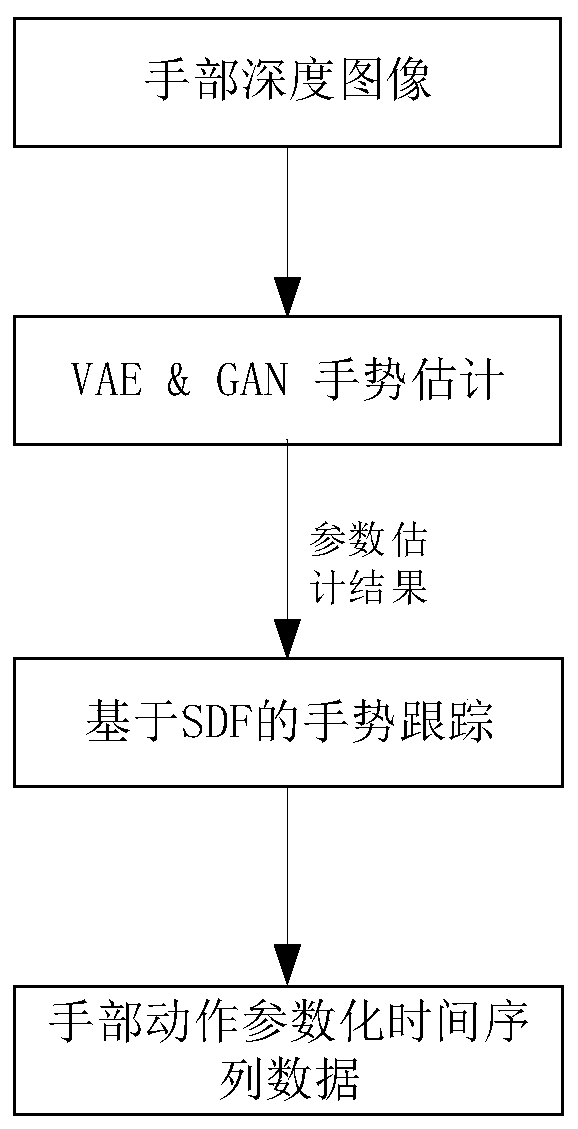
[0055] like figure 2 As shown, the present invention provides a method for hand pose estimation and tracking based on a depth image. The depth image of the hand obtained by a depth sensor uses a semi-supervised combination of a variational autoencoder (VAE) and a generative confrontation network (GAN). The hand pose estimation method obtains the hand parameter estimation, and then uses the gesture tracking method based on the signed distance function (SDF) to obtain the hand movement parameterized time series data; the specific implementation steps are as follows:
[0056] Step 1, a semi-supervised hand pose estimation method combining VAE and GAN. This method uses the characteristics that VAE can accurately approximate the real distribution of input variables to encode the input gesture depth image, and uses the discriminato...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More