

Gradual fault backtracking fault-tolerant method for inertial and satellite integrated navigation system
An integrated navigation system and satellite navigation technology, which is applied in the field of gradual fault tolerance of inertial/satellite integrated navigation systems, can solve the problems of fault tolerance processing, fault information pollution, and failure to achieve at the same time, and achieve the effect of improving accuracy and reliability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0030] The following examples describe the present invention in more detail.
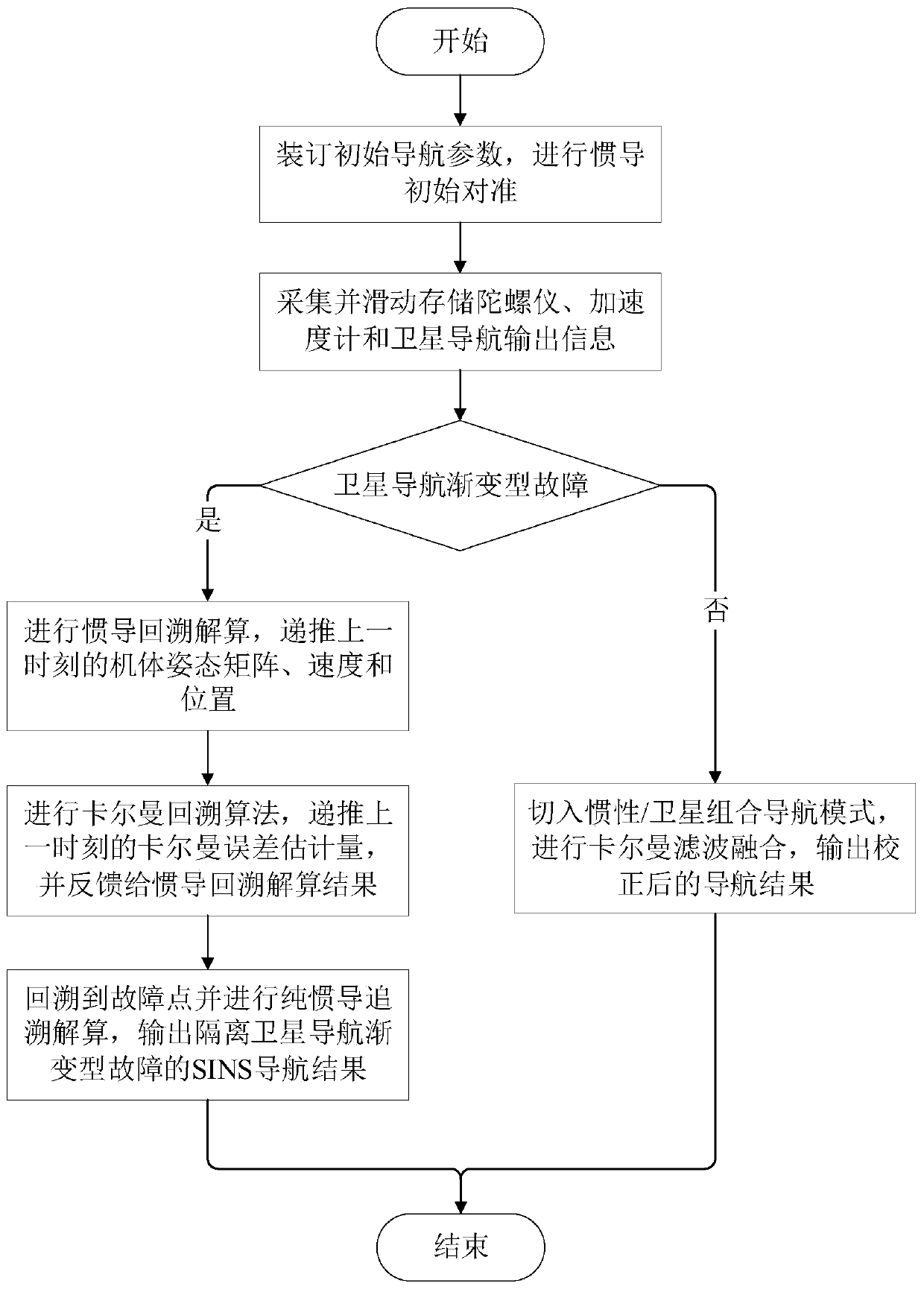
[0031] Step 1, start the inertial integrated navigation system, and bind the initial navigation parameters: the constant value offset ε of the inertial measurement device gyroscope x ,ε y ,ε z and the constant offset of the accelerometer▽ x ,▽ y ,▽ z , satellite navigation position measurement error initial latitude initial longitude λ 0 , initial height h 0 ;Perform initial alignment of inertial navigation system;
[0032] Step 2, collect sensor data, and slide storage [t k-M ,t k ], (M=h / T s ) sensor data in the time period, mainly including gyroscope information ω b , accelerometer information f b and satellite navigation latitude, longitude, altitude information Among them, t k is the kth sampling moment, M is the number of backtracking, h is the backtracking time, T s is the sampling period, b represents the carrier coordinate system;
[0033] Step 3, according to the satell...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More