

Monocular vision mapping and positioning method, device, storage medium and mobile device
A monocular vision and mobile device technology, applied in the field of computer vision, can solve the problems of decreased positioning accuracy and achieve the effects of improving positioning accuracy, reducing inaccurate positioning, and improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] Specific embodiments of the present disclosure will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present disclosure, and are not intended to limit the present disclosure.
[0068] In order to solve the problem of sensitivity to monocular camera parameters, IMU parameters, and monocular camera and IMU time synchronization in related technologies, the present disclosure provides a monocular vision mapping and positioning method, device, storage medium and mobile device .
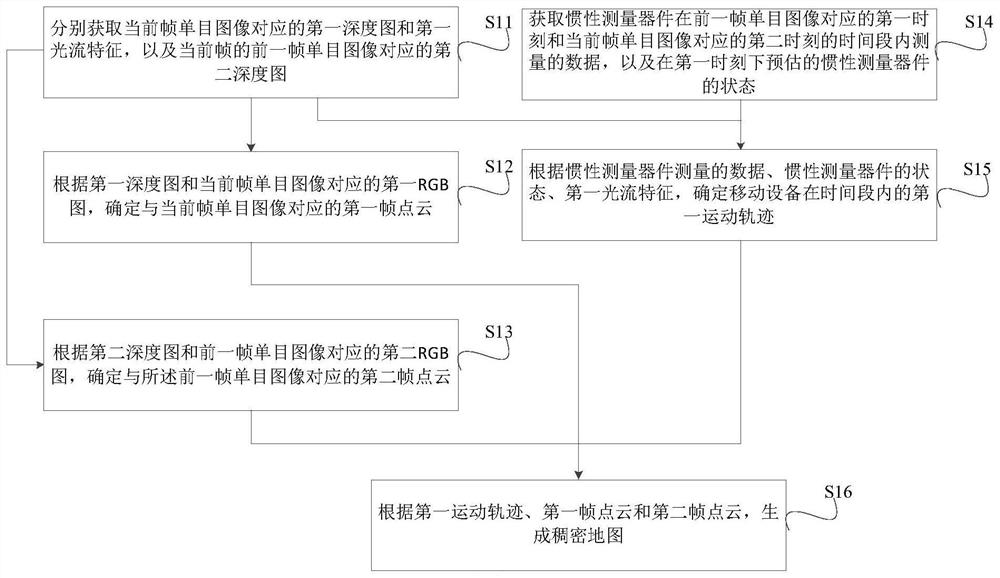
[0069] figure 1 It is a flowchart of a monocular vision mapping and positioning method according to an exemplary embodiment of the present disclosure, the method is applied to a mobile device, and the mobile device includes a monocular camera and an inertial measurement device IMU. Such as figure 1 As shown, the method may include the following steps.
[007...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More