

Method for estimating kinetic parameters of spatial non-cooperative target under unilateral constraint condition
A technology of non-cooperative targets and dynamic parameters, which is applied in the field of estimating the dynamic parameters of non-cooperative targets in space, can solve the problems of inability to measure target dynamic parameters and detect whether there is relative sliding, and achieve strong engineering application prospects and overall thinking Novel and highly innovative effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the embodiments and accompanying drawings, and the contents mentioned in the embodiments are not intended to limit the present invention.
[0036] A method for estimating the dynamic parameters of a space non-cooperative target under a unilateral constraint situation of the present invention comprises the following steps:
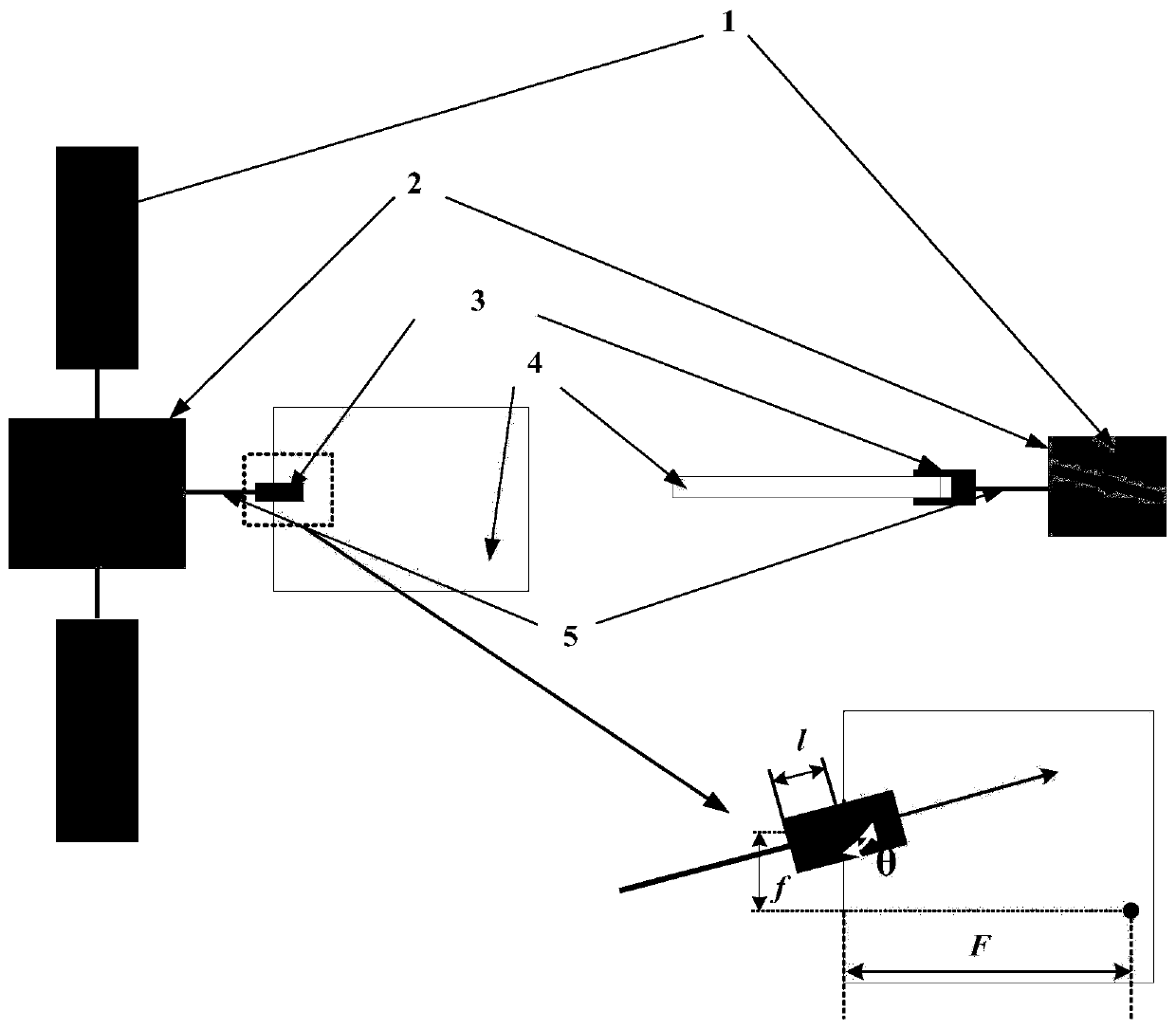
[0037] Step 1: Create as figure 1 As shown in the simulation scene, the left side of the figure is the top view of the simulation scene, the right side is the main view of the simulation scene, and the lower right corner of the figure is the enlarged view of the connection position between the end of the manipulator and the captured target; the satellite solar panel of the manipulator 1 provides the power source for the manipulator mechanism, the manipulator base satellite 2 provides support for the manipulat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More