

Multitask multirole remote operated vehicle (ROV) cooperative training simulating system and method
A collaborative training and simulation system technology, applied in the field of ROV collaborative training simulation system, can solve problems such as the inability of a single ROV to meet the needs of work efficiency, difficult task process control, and complex instance task structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention will be further described below in conjunction with specific examples and accompanying drawings.
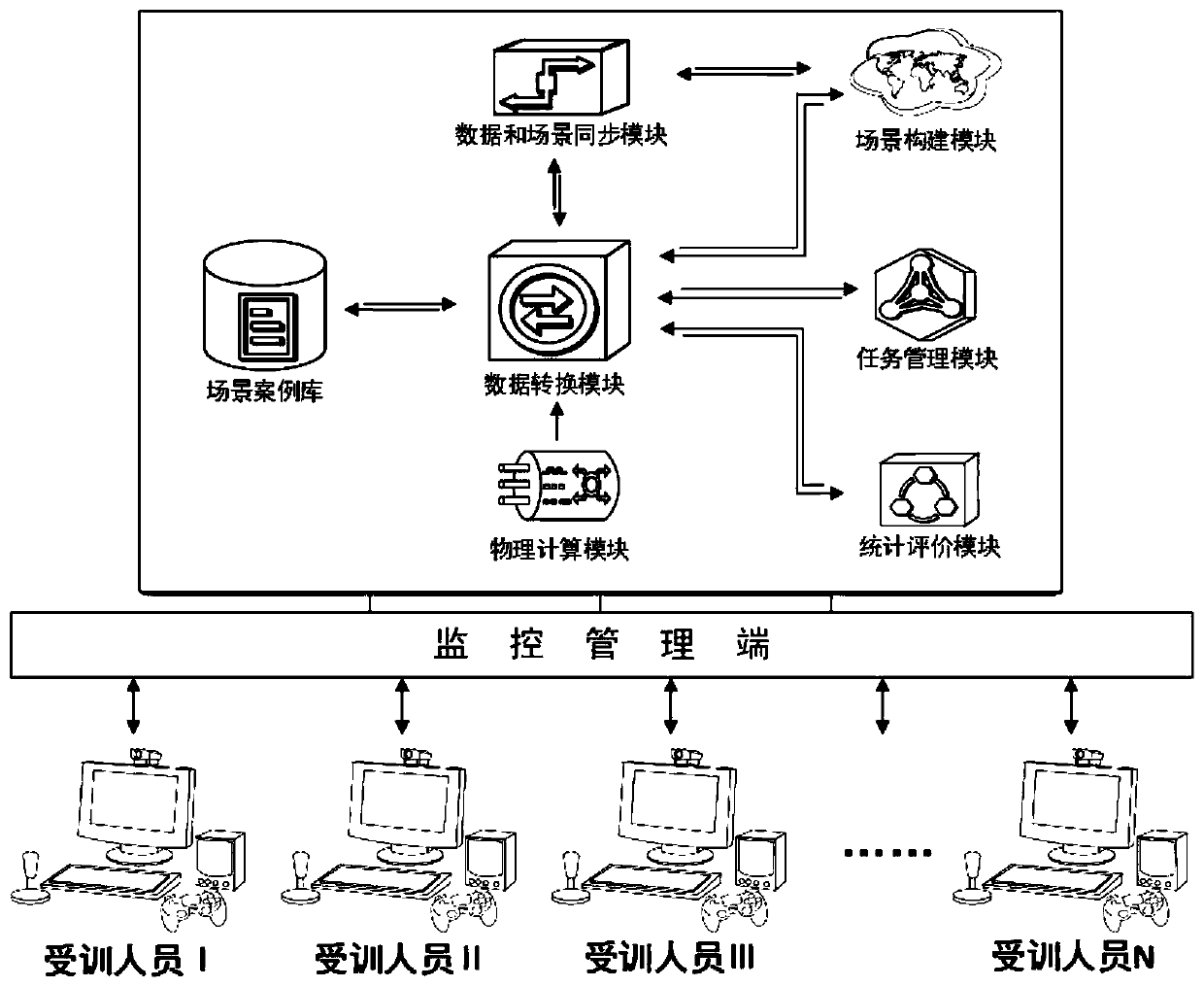
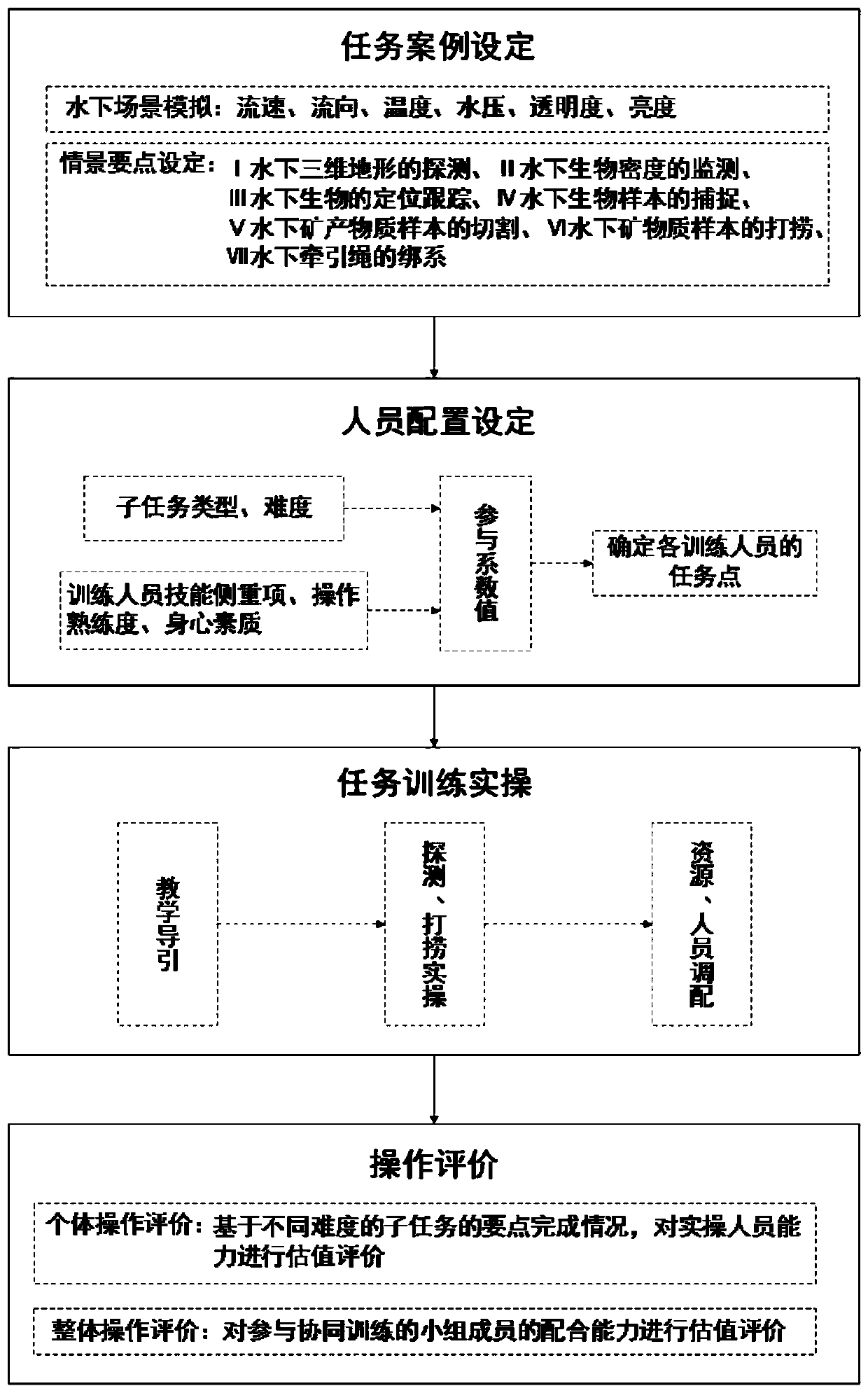
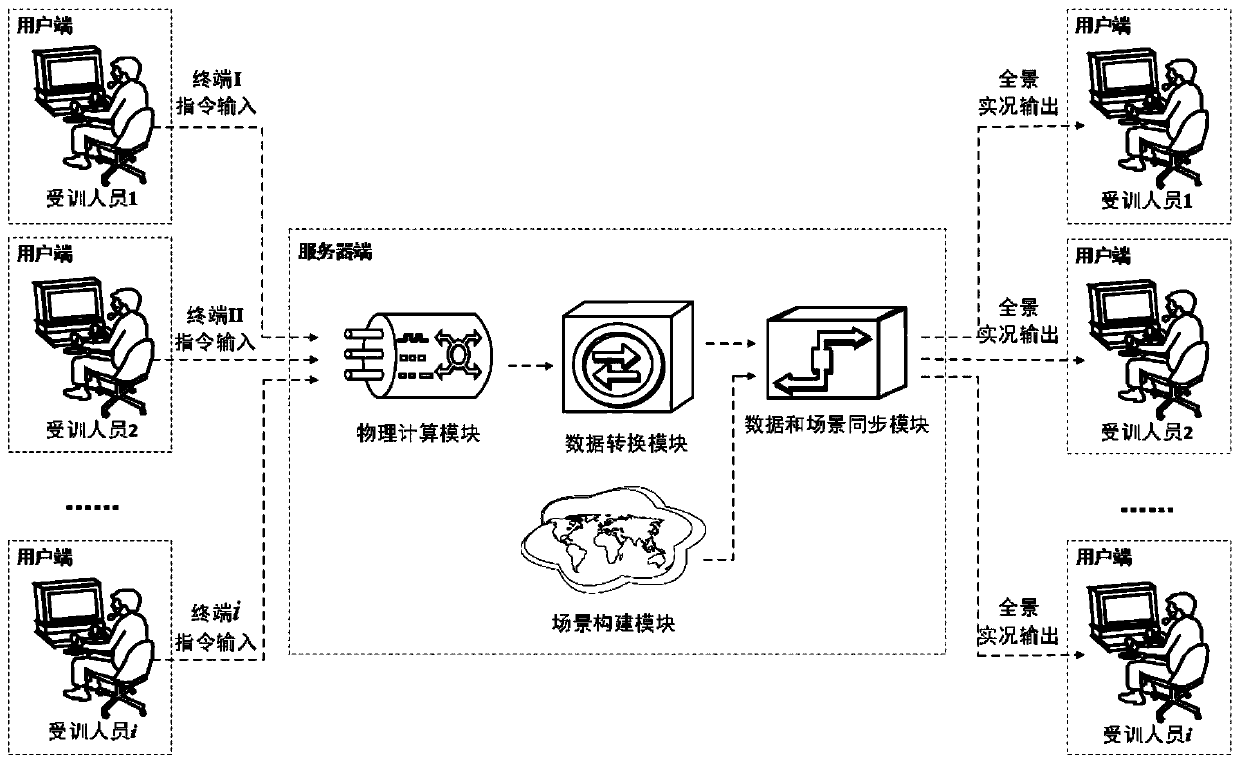
[0064] figure 1 It is a structure and staffing diagram of an embodiment of the present invention, figure 2 It is a logical framework diagram of an embodiment of the present invention, image 3 It is a synoptic data flow schematic diagram of an embodiment of the present invention, a multi-task, multi-role ROV collaborative training simulation system, which is formed by connecting a server, a monitoring management terminal and a plurality of console terminals through a local area network; wherein
[0065] The server is used to store, organize, and call various data packets, comprehensively display various data in the form of dynamic simulation, provide trainers with real-time simulation scenes and on-site display of ROV status, and continuously receive instructions input by trainers. And process the instruction data, store it as new simulation data,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More