Upper limb rehabilitation training robot
A technology of rehabilitation training and robotics, applied in passive exercise equipment, physical therapy, etc., can solve the problems of poor rehabilitation effect, high labor intensity, and difficulty in ensuring the accuracy and consistency of completed movements, so as to reduce labor intensity and ensure Accuracy and Consistency, Effect of Good Rehabilitation Training Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
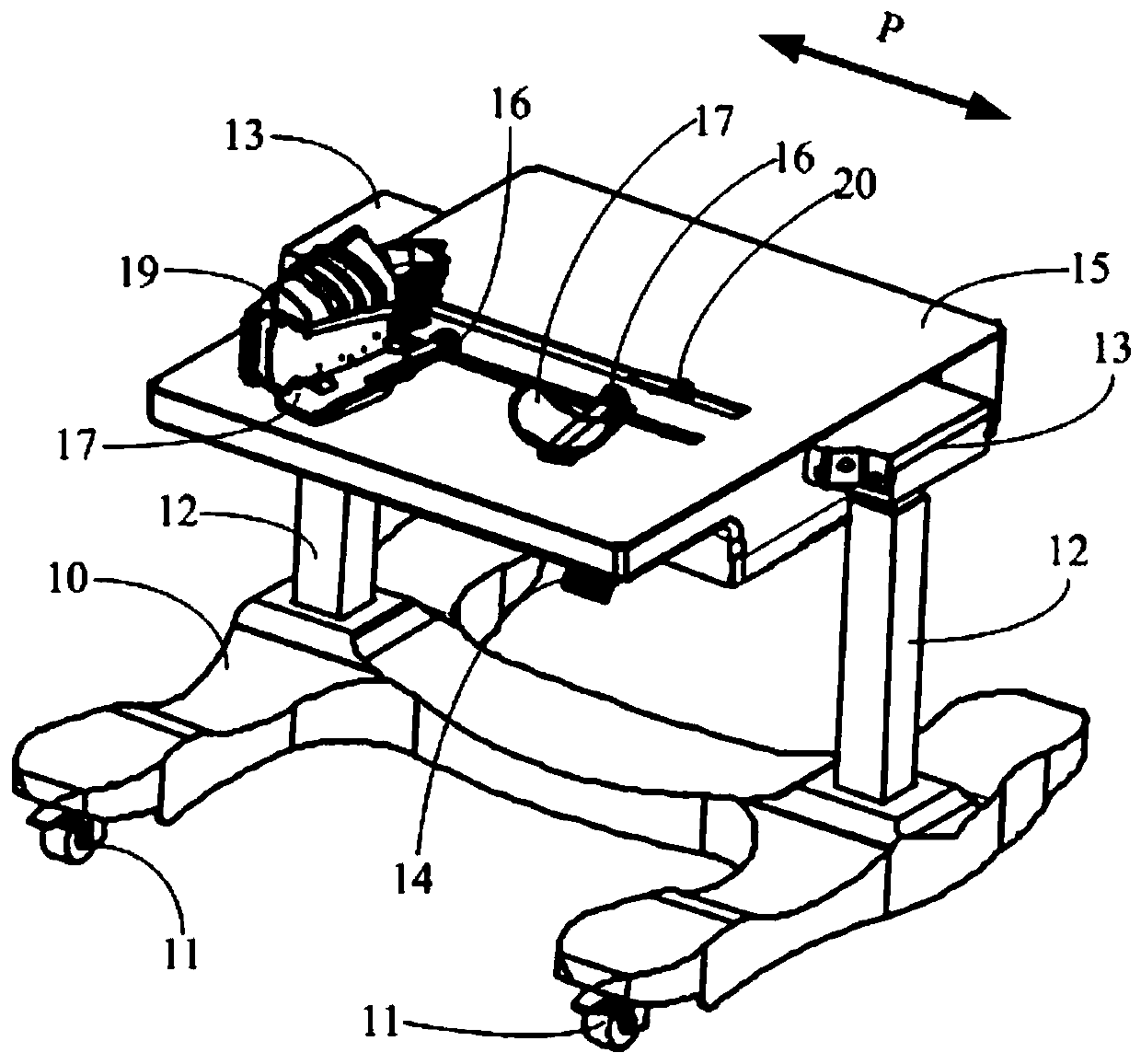
[0063] In this embodiment, as figure 1 As shown, there can be two supporting structures, namely the left limb supporting structure and the right limb supporting structure. The left limb supporting structure and the right limb supporting structure can be arranged at intervals in the first direction P; The limb supporting structure is used to support the left upper limb of the patient, and the right limb supporting structure is used to support the right upper limb of the patient.
[0064] The training module may include a hand joint continuous passive activity instrument 19 and a gesture sensing recognizer 20, which is slidably mounted on the workbench 15; wherein, one of the left limb supporting structure and the right limb supporting structure The supporting part 17 is equipped with a hand joint continuous passive activity instrument 19, and the other can be opposed to a gesture-sensitive recognizer 20; this gesture-sensitive recognizer 20 is used to identify the upper limbs on th...
Embodiment 2
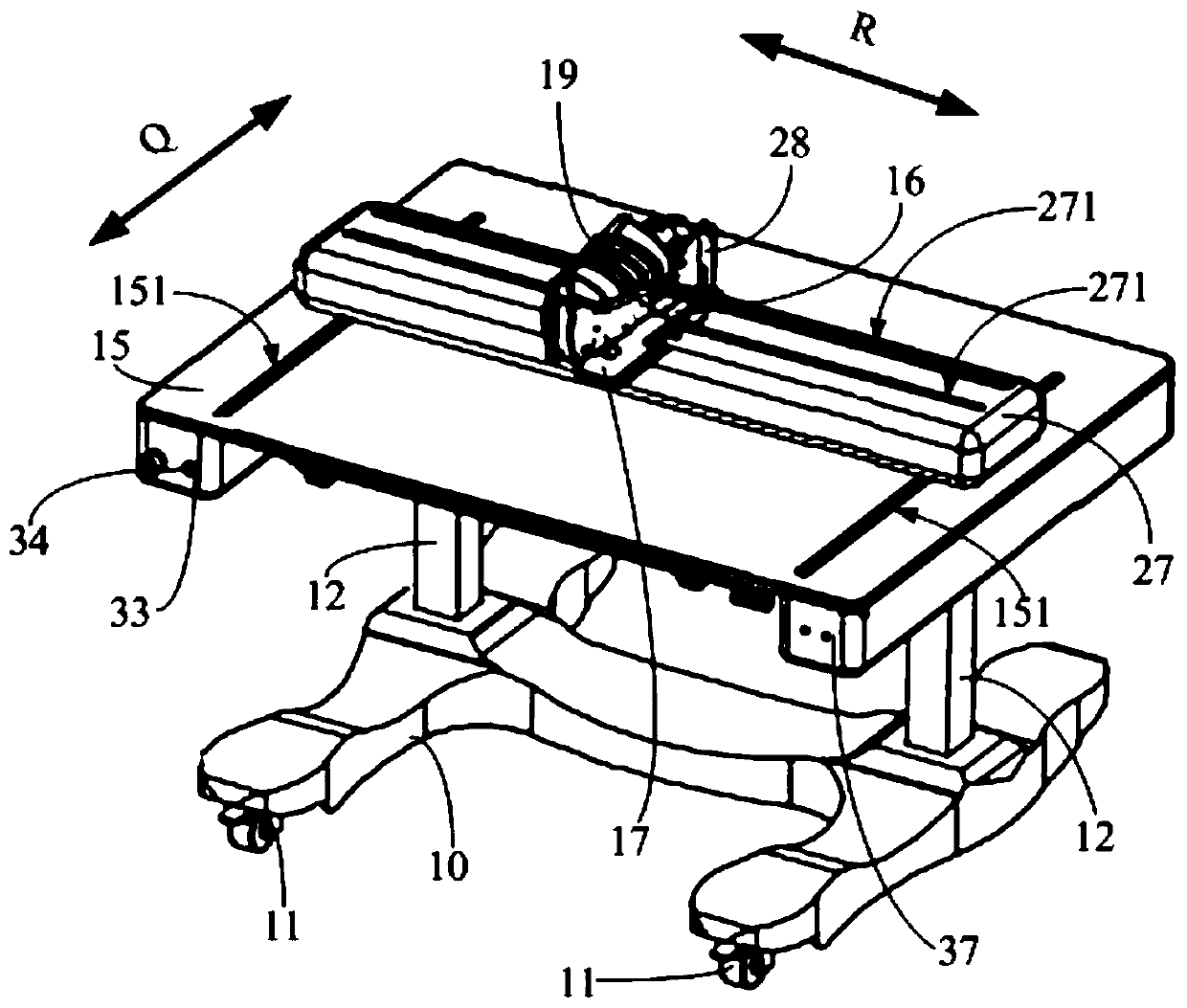
[0076] Such as figure 2 As shown, the training module may include a transmission component and a detection component. The transmission assembly may include a training platform 27, a first transmission structure (not shown in the figure) and a second transmission structure (not shown in the figure); the training platform 27 can be movably installed on the workbench 15 through the first transmission structure, The second transmission structure is installed on the training platform 27. Such as Figure 7 As shown, the detection component can be connected to the second transmission structure, and the detection component is located on one side of the supporting structure and connected to the supporting structure. The detection component can include a grip sensor and a pressure sensor 29 connected to the grip sensor.
[0077] It should be noted that, in order to facilitate the connection between the detection component and the supporting structure, the detection component may include a...
Embodiment 3
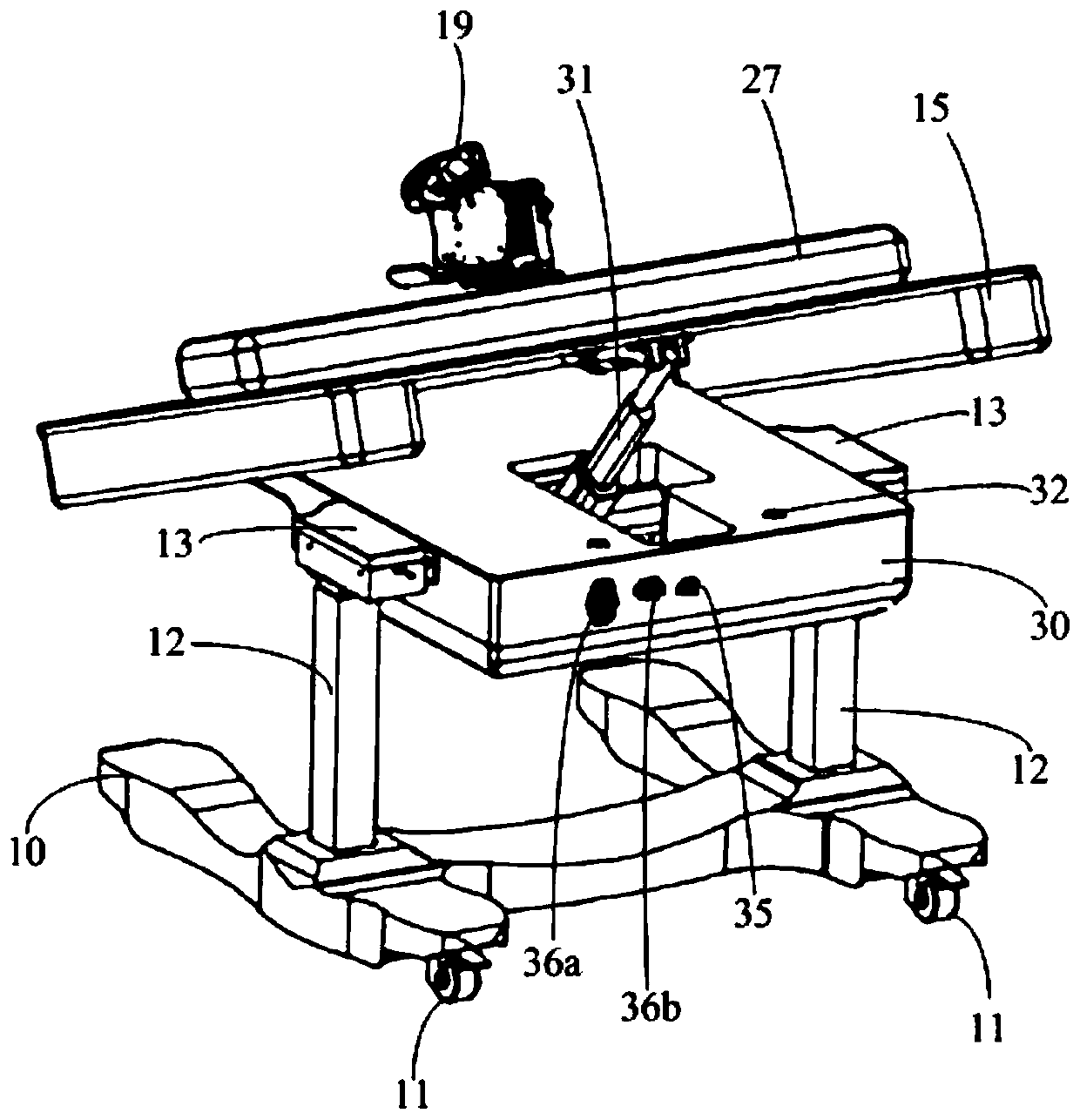
[0087] The main difference between the training module of this embodiment and the training module of the second embodiment is that the transmission modes of the first transmission structure and the second transmission structure are different, and the other structures can be the same as those of the second embodiment, which will not be described in detail here. .
[0088] Specifically, the transmission mode of the first transmission structure and the second transmission structure in the first embodiment is ball screw transmission, while the transmission mode of the first transmission structure and the second transmission structure in this embodiment is synchronous belt transmission, which can achieve High-speed mute effect. The first transmission structure and the second transmission structure in this embodiment will be described in detail below.
[0089] In this embodiment, at least one of the first transmission structure and the second transmission structure includes a drive moto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com