

Improved Gaussian particle filter data fusion algorithm based on KLD sampling
A Gaussian particle filter and particle number technology, applied in the field of signal processing, to achieve good real-time performance, improved filtering speed, and easy combination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
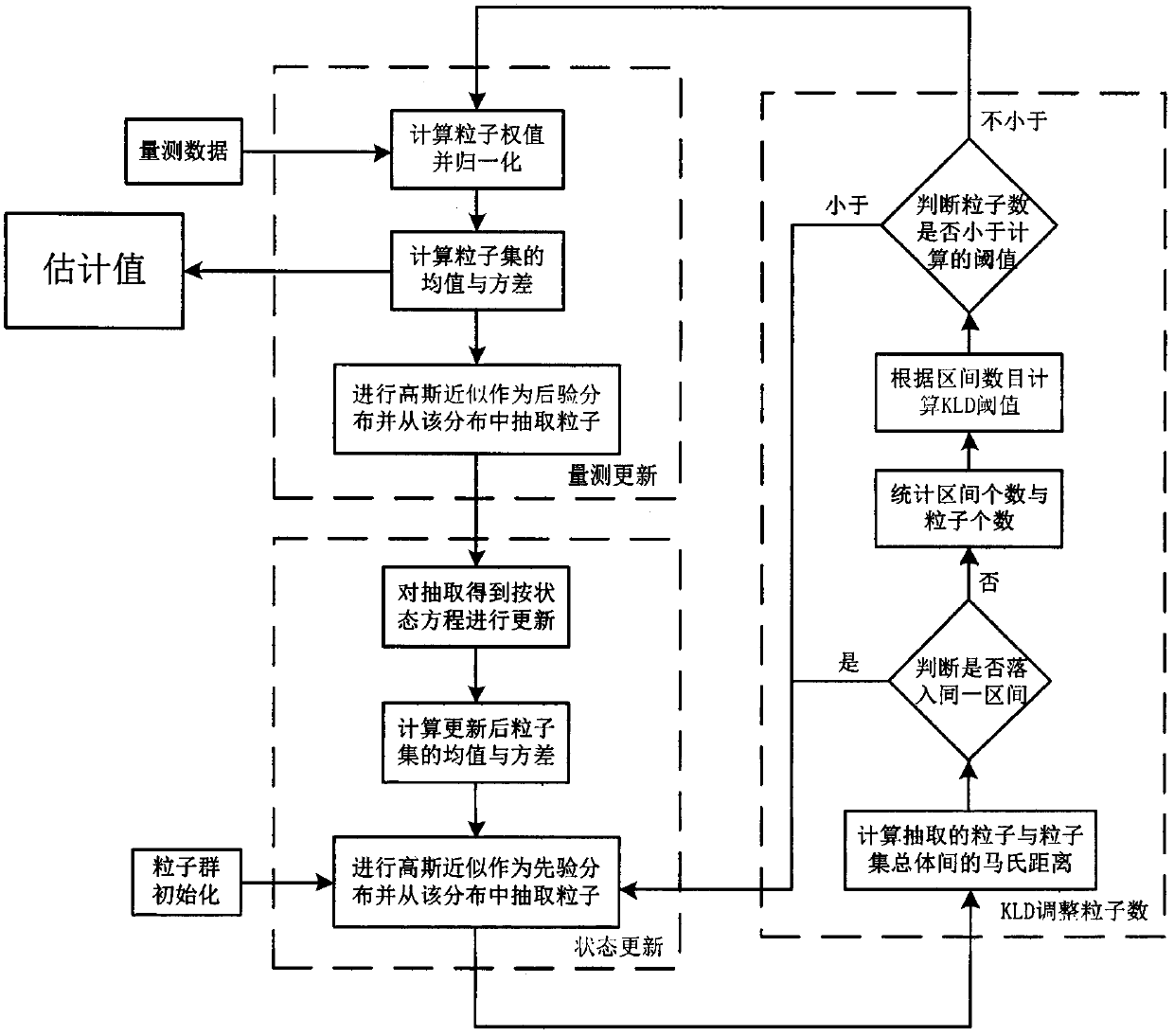
[0046] The following describes the embodiment of the present invention in detail, and this embodiment is exemplary, and is only used to explain the present invention, and should not be construed as limiting the present invention. With reference to the accompanying drawings of the description, a kind of Gaussian particle filter algorithm based on KLD improvement of the present invention is described in detail as follows:
[0047] In order to better reflect the implementation and effect of the specific steps of the present invention, the following simulation experiments are set up: a one-dimensional strong nonlinear model is adopted, and its model function can be written as follows:
[0048]
[0049]
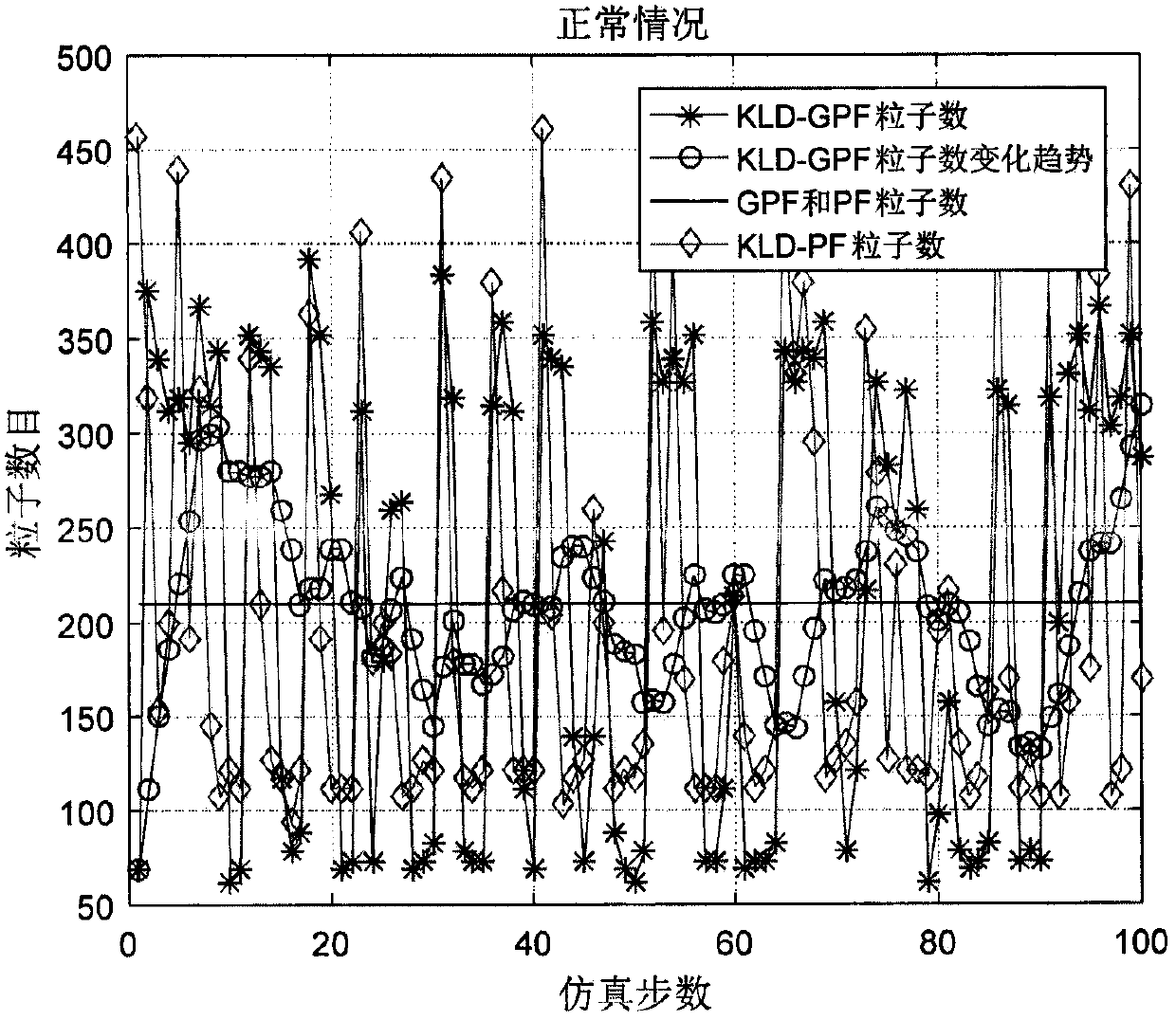
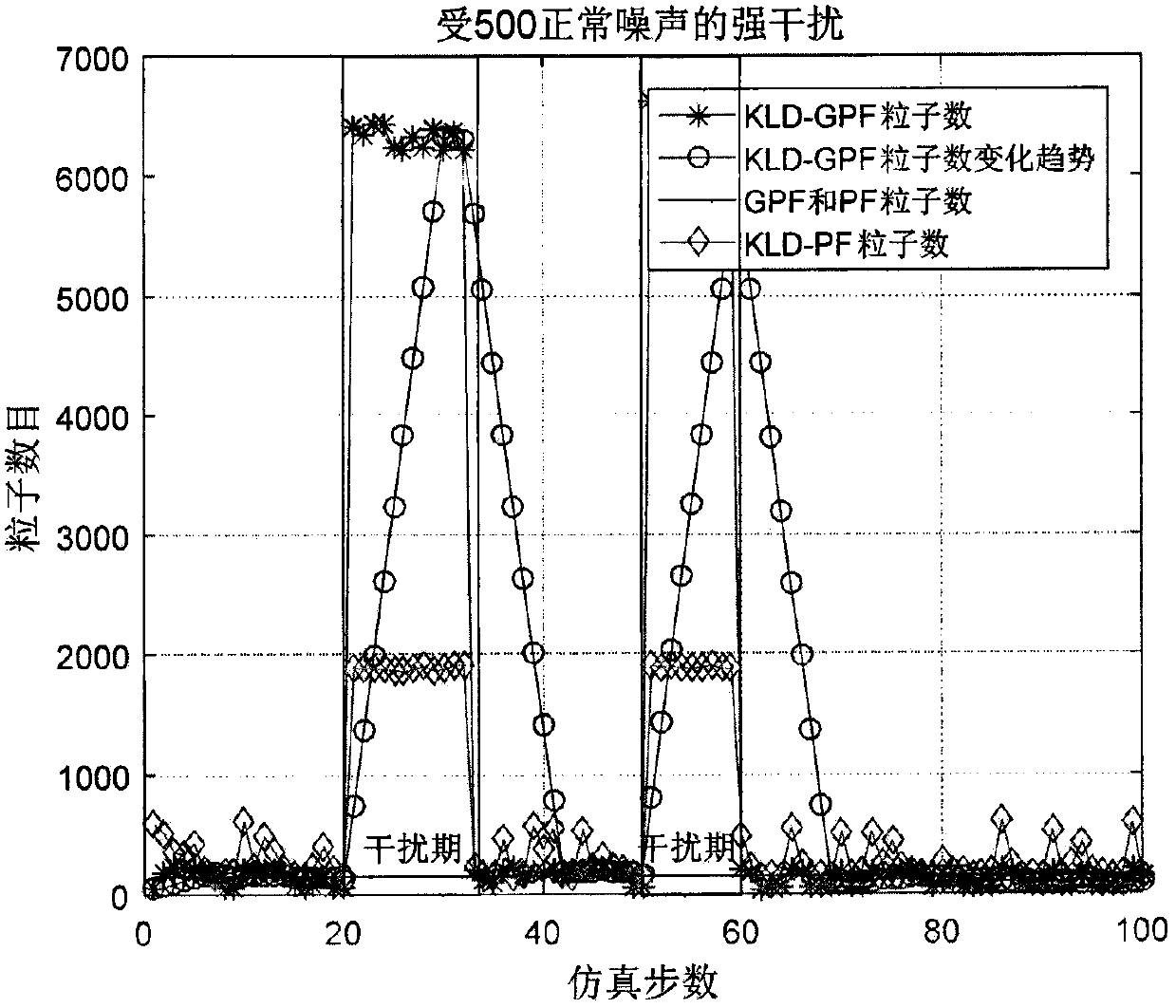
[0050] The simulation experiment environment and related parameters are as follows: the simulation software is MATLAB, the hardware environment is Intel i5-6500, the maximum main frequency is 3.20GHz, and the running memory is 7.87GB. The initial particle swarm is Q n for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More