

A robot positioning method combining camera, imu and lidar
A technology of robot positioning and laser radar, applied in the direction of instruments, electromagnetic wave re-radiation, image analysis, etc., can solve the problems of low accuracy and stability, point cloud matching, etc., and achieve the effect of eliminating cumulative errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with accompanying drawing:
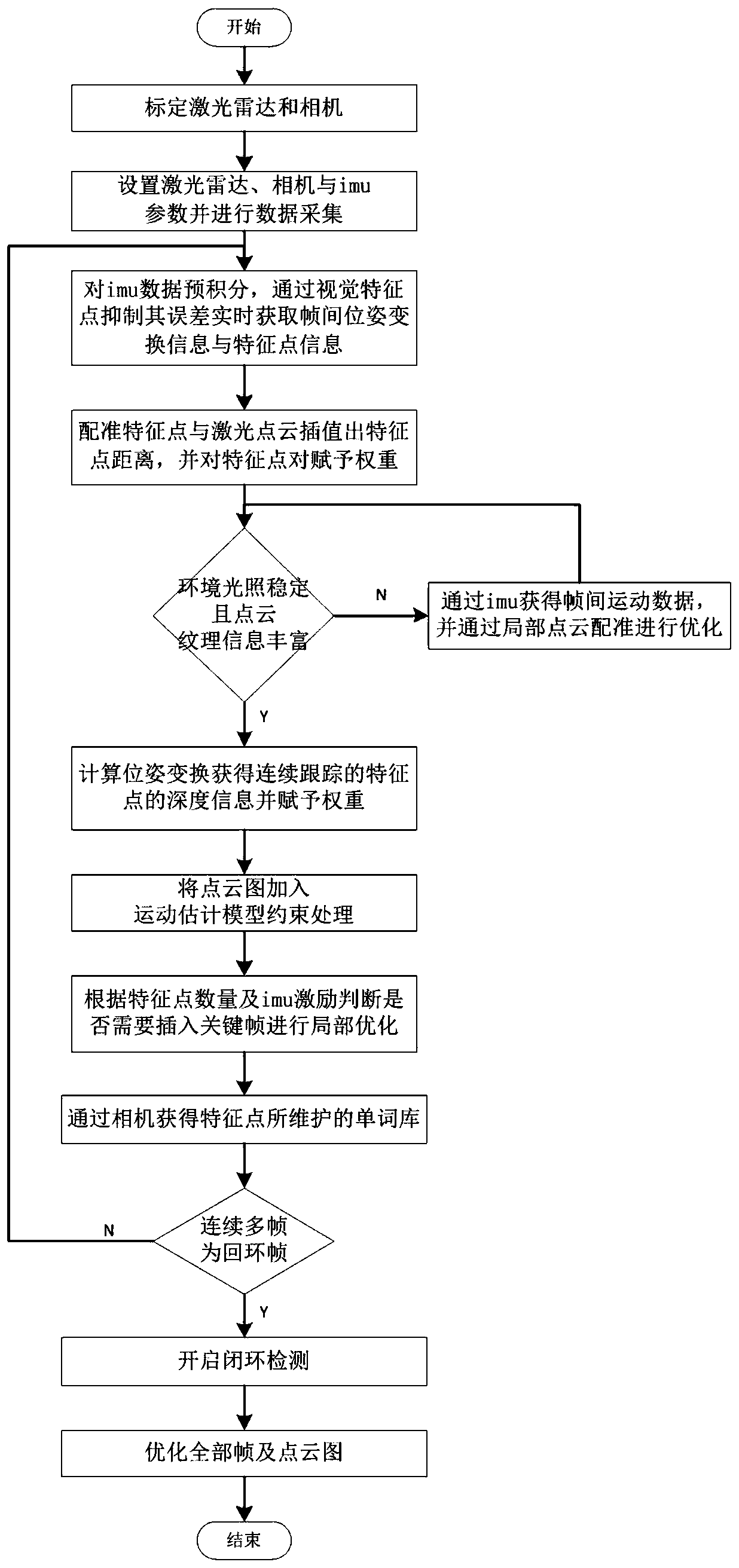
[0032] Such as figure 1 As shown, the purpose of the present invention is to provide a robot positioning method combining camera, imu and laser radar in order to solve the above problems, including the following steps:
[0033] S1: Calibrate the lidar and camera so that the laser points and pixels can achieve pixel-level accuracy;
[0034] S2: Set the lidar scanning frequency, scanning angle, camera frame rate and imu frequency and collect data;
[0035] S3: Pre-integrate the imu data, and suppress its error through visual feature points, and obtain inter-frame pose transformation information and feature point information in real time;
[0036] S4: Register feature points and laser point cloud, select feature point ray to be located in the feature point pair of laser point cloud curvature smaller area, interpolate out feature point distance, and assign primary weight to f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More